Parameterized Explainer for Graph Neural Network
Dongsheng Luo1 Wei Cheng2 Dongkuan Xu1 Wenchao Yu2 Bo Zong2 Haifeng Chen2 Xiang Zhang1
1The Pennsylvania State University
2NEC Labs America
1{dul262,dux19,xzz89}@psu.edu
2{weicheng,wyu,bzong,haifeng}@nec-labs.com
34th Conference on Neural Information Processing Systems (NeurIPS 2020), Vancouver, Canada.
Abstract
Despite recent progress in Graph Neural Networks (GNNs), explaining
predictions made by GNNs remains a challenging open problem. The leading
method independently addresses the local explanations (i.e., important subgraph
structure and node features) to interpret why a GNN model makes the prediction
for a single instance, e.g. a node or a graph. As a result, the explanation
generated is painstakingly customized for each instance. The unique explanation
interpreting each instance independently is not sufficient to provide a global
understanding of the learned GNN model, leading to the lack of generalizability
and hindering it from being used in the inductive setting. Besides, as it is
designed for explaining a single instance, it is challenging to explain a set of
instances naturally (e.g., graphs of a given class). In this study, we address these
key challenges and propose PGExplainer, a parameterized explainer for GNNs.
PGExplainer adopts a deep neural network to parameterize the generation process
of explanations, which enables PGExplainer a natural approach to explaining
multiple instances collectively. Compared to the existing work, PGExplainer has
better generalization ability and can be utilized in an inductive setting easily.
Experiments on both synthetic and real-life datasets show highly competitive
performance with up to 24.7% relative improvement in AUC on explaining graph
classification over the leading baseline.
1 Introduction
Graph Neural Networks (GNNs) are powerful tools for representation learning of graph-structured data,
such as social networks [46], document citation graphs [33], and microbiological graphs [44]. GNNs
broadly adopt a message passing scheme to learn node representations by aggregating representation
vectors of its neighbors [49, 16]. This scheme enables GNN to capture both node features and graph
topology. GNN-based methods have achieved state-of-the-art performance in node classification, graph
classification, and link prediction, etc [21, 45, 56].
Despite their remarkable effectiveness, the rationales of predictions made by GNNs are not easy for humans
to understand. Since GNNs aggregate both node features and graph topology to make predictions, to
understand predictions made by GNNs, important subgraphs and/or a set of features, which are also known
as explanations, need to be uncovered. In the literature, although a variety of efforts have been undertaken
to interpret general deep neural networks, existing approaches [6, 26, 12, 31, 43, 19, 20] in this line fall
short in their ability to explain graph structures, which is essential for GNNs. Explaining predictions made
by GNNs remains a challenging open problem, on which few methods have been proposed. The
combinatorial nature of explaining graph structures makes it difficult to design models that
are both robust and efficient. Recently, the first general model-agnostic approach for GNNs,
GNNExplainer [53], was proposed to address the problem. It takes a trained GNN and its predictions as
inputs to provide interpretable explanations for a given instance, e.g. a node or a graph. The
explanation includes a compact subgraph structure and a small subset of node features that are crucial
in GNN’s prediction for the target instance. Nevertheless, there are several limitations in the
existing approach. First, GNNExplainer largely focuses on providing the local interpretability
by generating a painstakingly customized explanation for a single instance individually and
independently. The explanation provided by GNNExplainer is limited to the single instance, making
GNNExplainer difficult to be applied in the inductive setting because the explanations are hard to
generalize to other unexplained nodes. As pointed out in previous studies, models interpreting
each instance independently are not sufficient to provide a global understanding of the trained
model [19]. Furthermore, GNNExplainer has to be retrained for every single explanation. As a result,
in real-life scenarios where plenty of nodes need to be interpreted, GNNExplainer would be
time-consuming and impractical. Moreover, as GNNExplainer was developed for interpreting
individual instances, the explanatory motifs are not learned end-to-end with a global view of the
whole GNN model. Thus, it may suffer from suboptimal generalization performance. How to
explain predictions of GNNs on a set of instances collectively and easily generalize the learned
explainer model to other instances in the inductive setting remains largely unexplored in the
literature.
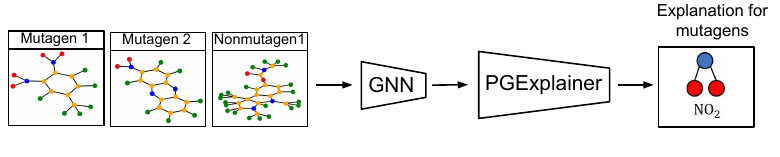
To provide a global understanding of predictions made by GNNs, in this study, we emphasize the collective
and inductive nature of this problem and present our method PGExplainer (Figure 1). PGExplainer is a
general explainer that applies to any GNN based models in both transductive and inductive settings.
Specifically, a generative probabilistic model for graph data is utilized in PGExplainer. Generative models
have shown the power to learn succinct underlying structures from the observed graph data [23].
PGExplainer uncovers these underlying structures as the explanations, which is believed to make the most
contribution to GNNs’ predictions [35]. We model the underlying structure as edge distributions, where the
explanatory graph is sampled. To collectively explain predictions of multiple instances, the generation
process in PGExplainer is parameterized with a deep neural network. Since the neural network
parameters are shared across the population of explained instances, PGExplainer is naturally
applicable to provide model-level explanations for each instance with a global view of the GNN
model. Furthermore, PGExplainer has better generalization power because a trained PGExplainer
model can be utilized in an inductive setting to infer explanations of unexplained nodes without
retraining the explanation model. This also makes PGExplainer much faster than the existing
approaches.
Experimental results on both synthetic and real-life datasets demonstrate that PGExplainer can achieve
consistent and accurate explanations, bringing up to 24.7% improvement in AUC over the SOTA method on
explaining graph classification with significant speed-up.
2 Related work
Graph neural networks. Graph Neural networks (GNNs) have achieved remarkable success in
various tasks, including node classification [25, 21, 45, 48], graph classification [10], and link
prediction [56]. The study of GNNs was initiated in [17], and then extended in [41]. These methods
iteratively aggregate neighbor information to learn node representations until reaching a static
state. Inspired by the success of convolutional neural networks (CNNs) in computer vision,
attempts of applying convolutional operations to graphs were derived based on graph spectral
theory [4] and graph Fourier transformation [42]. In recent work, GNNs broadly encode node
features as messages and adopt the message passing mechanism to propagate and aggregate
them along edges to learn node/graph representations, which are then utilized for downstream
tasks [25, 10, 41, 29, 45, 34, 47]. For efficiency consideration, localized filters were proposed
to reduce computation cost [21]. The self-attention mechanism was introduced to GNNs in
GAT to differentiate the importance of neighbors [45]. Xu. et al. analyzed the relationship
between GNNs and Weisfeiler-Lehman graph isomorphism test, and showed the express power of
GNNs [49].
Explaining GNNs. Interpretability and feature selection have been extensively addressed in neural
networks. Methods demystifying complicated deep learning models can be grouped into two main families,
whitebox and blackbox [19, 20]. Whitebox mechanisms mainly focus on yielding explanations for
individual predictions. Forward and backward propagation based methods are used routinely in whitebox
mechanisms. Forward propagation based methods broadly perturb the input and/or hidden representations
and check the corresponding updating results in the downstream task [8, 14, 28]. The underlying intuition
is that the outputs of the downstream task are likely to significantly change if important features are
occluded. Backward propagation based methods, in general, infer important features from the
gradients of the deep neural networks. They compute weights of features by propagating the
gradients from the output back to the input. Blackbox methods generate explanations by locally
learning interpretable models, such as linear models, and additive models to approximate the
predictions [32, 5].
Following the line of forward propagation methods, GNNExplainer initiates the research on explaining
predictions on graph-structured data [53]. It excludes certain edges and node features to observe the
changes in node/graph classification. Explanations (subgraphs/important features) are extracted by
maximizing the mutual information between the distribution of possible subgraphs and the GNN’s
prediction. However, similar to other forward propagation methods, GNNExplainer generates customized
explanations for single instance prediction independently, making it insufficient to provide a global
understanding of the trained GNN model. Besides, it is naturally difficult to be applied in the
inductive setting and provide explanations for multiple instances. XGNN provides model-level
explanations without preserving the local fidelity [55]. Thus, the generated explanation may
not be a substructure of the real input graph. On the other hand, PGExplainer can provide an
explanation for each instance with a global view of the GNN model, which can preserve the local
fidelity.
Graph generation. PGExplainer learns a probabilistic graph generative model to provide explanations for
GNNs. The first model generating random graph is the Erdős–Rényi model [15, 11]. In the random graph
proposed by Gilbert, each potential edge is independently chosen from a Bernoulli distribution. Some
approaches generate graphs with certain properties reflected, such as pairwise distances betweenness [7],
node degree distribution [27], and spectral properties [22, 2]. In recent years, deep learning models have
shown great potential to generate graphs with complex properties preserved [54, 18, 35].
However, these methods mainly aim to generate graphs that reflect certain properties in the training
graphs.
3 Background
We first describe notations, and then provide some background on graph neural networks.
Notations. Let G = ( ,
, ) represent the graph with = {v1,v2...vN} denoting the node set and
∈× as the edge set. The numbers of nodes and edges are denoted by N and M, respectively. A
graph can be described by an adjacency matrix A ∈{0,1}N×N, with aij = 1 if there is an edge connecting
node i and j, and aij = 0 otherwise. Nodes in are associated with the d-dimensional features, denoted by
X ∈ ℝN×d.
) represent the graph with = {v1,v2...vN} denoting the node set and
∈× as the edge set. The numbers of nodes and edges are denoted by N and M, respectively. A
graph can be described by an adjacency matrix A ∈{0,1}N×N, with aij = 1 if there is an edge connecting
node i and j, and aij = 0 otherwise. Nodes in are associated with the d-dimensional features, denoted by
X ∈ ℝN×d.
Graph neural networks. GNNs adopt the message-passing mechanism to propagate and aggregate
information along edges in the input graph to learn node representations [25, 21, 45, 16]. Each GNN
layer includes three essential steps. First, at the propagation step of the i-th GNN layer, for each edge (i,j),
GNN computes a message mijl = Message(hil-1,hjl-1), where hil-1 and hjl-1 are representations of
vi and vj in previous layer, respectively. Second, at the aggregation step, for each node vi, GNN
aggregates messages received from its neighbor nodes, denoted by  i, with an aggregation function
mi⋅l = aggregation({mijl|j ∈i}). Last, at the updating step, GNN updates the vector representation for
each node vi via hil = update(mi⋅l,hil-1), a function taking the aggregated message and the
representation of itself as inputs. Hidden representation of the last GNN layer serves as the final node
representation: zi = hiL, which is then used for downstream tasks, such as node/graph classification and
link prediction.
i, with an aggregation function
mi⋅l = aggregation({mijl|j ∈i}). Last, at the updating step, GNN updates the vector representation for
each node vi via hil = update(mi⋅l,hil-1), a function taking the aggregated message and the
representation of itself as inputs. Hidden representation of the last GNN layer serves as the final node
representation: zi = hiL, which is then used for downstream tasks, such as node/graph classification and
link prediction.
4 The PGExplainer
In this section, we introduce PGExplainer. Different from GNNExplainer which provides explanations on
both structure and features, PGExplainer focuses on explanation on graph structures because feature
explanation in GNNs is similar to that in non-graph neural networks, which has been extensively studied in
the literature [1, 19, 32, 39, 8, 14, 28]. PGExplainer is flexible and applicable to interpret all kinds of
GNNs. We start with the learning objective of PGExplainer (Section 4.1) and then present the
reparameterization strategy for efficient optimization (Section 4.2). In Section 4.3, we specify particular
instantiations to understand GNNs on node and graph classifications. Detailed algorithms can be found in
the Appendix.
4.1 The learning objective
The literature has shown that real-life graphs are with underling structures [35, 37]. To explain
predictions made by a GNN model, we divide the original input graph Go into two subgraphs:
Go = Gs + ΔG, where Gs presents the underlying subgraph that makes important contributions to
GNN’s predictions, which is the expected explanatory graph, and ΔG consists of the remaining
task-irrelevant edges for predictions made by the GNN. Following [53], PGExplainer finds Gs by
maximizing the mutual information between the GNN’s predictions and the underlying structure
Gs:
where Y o is the prediction of the GNN model with Go as the input. The mutual information quantifies the
probability of prediction Y o when the input graph to the GNN model is limited to the explanatory graph
Gs. The intuition behind comes from the traditional forward propagation based methods for the whitebox
explanation [8]. For example, if removing an edge (i,j) dramatically changes the prediction in the GNN,
then this edge is important and should be included in Gs. Otherwise, it can be considered as irrelevant edge
for the GNN model to make the prediction. Since H(Y o) is only related to the GNN model whose
parameters are fixed in the explanation stage, the objective is equivalent to minimizing the conditional
entropy H(Y o|G = Gs).
However, the direct optimization of the above objective function is intractable as there are 2M candidates
for Gs. Thus, we consider a relaxation by assuming that the explanatory graph is a Gilbert
random graph [15], where selections of edges from the original input graph Go are conditionally
independent to each other. Let eij ∈× be the binary variable indicating whether the edge
is selected, with eij = 1 if the edge (i,j) is selected, and 0 otherwise. Let G be the random
graph variable. Based on the above assumption, the probability of a graph G can be factorized
as:
A straightforward instantiation of P(eij) is the Bernoulli distribution eij ~ Bern(θij). P(eij = 1) = θij is
the probability that edge (i,j) exists in G. With this relaxation, we thus can rewrite the objective
as:
where q(Θ) is the distribution of the explanatory graph parameterized by θ’s.
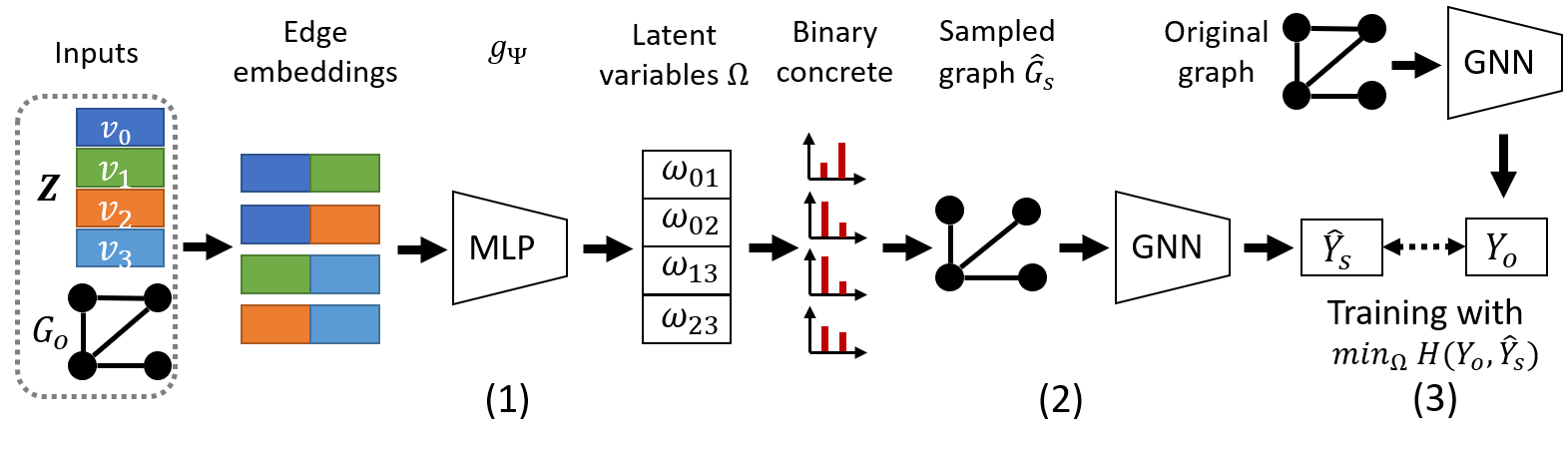
4.2 The reparameterization trick
Due to the discrete nature of Gs, we relax edge weights from binary variables to continuous variables in the
range (0,1) and adopt the reparameterization trick to efficiently optimize the objective function with
gradient-based methods [24]. We approximate the sampling process Gs ~ q(Θ) with a determinant
function of parameters Ω, temperature τ, and an independent random variable ϵ: Gs ≈Ĝs = fΩ(Go,τ,ϵ).
The temperature τ is used to control the approximation. Here we utilize the binary concrete distribution as
the instantiation [36]. Specifically, the weight êij ∈ (0,1) of edge (i,j) in Ĝs is calculated
by:
where σ(⋅)is the Sigmoid function, and ωij ∈ ℝ is the parameter. When τ → 0, the weight êij is binarized
with limτ→0P(êij = 1) =  . Since P(eij = 1) = θij, by choosing ωij = log
. Since P(eij = 1) = θij, by choosing ωij = log  , we have
limτ→0Ĝs = Gs. This demonstrates the rationality of using binary concrete distribution to
approximate the Bernoulli distribution. Moreover, with temperature τ > 0, the objective function is
smoothed with a well-defined gradient
, we have
limτ→0Ĝs = Gs. This demonstrates the rationality of using binary concrete distribution to
approximate the Bernoulli distribution. Moreover, with temperature τ > 0, the objective function is
smoothed with a well-defined gradient  .Thus, with reparameterization, the objective in Eq. (3)
becomes:
.Thus, with reparameterization, the objective in Eq. (3)
becomes:
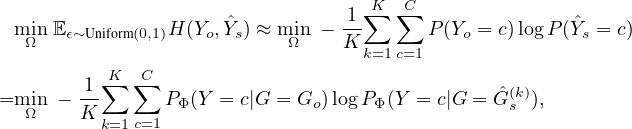
Considering efficient optimization, we follow [53] to modify the conditional entropy with cross-entropy
H(Y o,Ŷs), where Ŷs is the prediction of the GNN model with Ĝs as the input. With the above relaxations,
we adopt Monte Carlo to approximately optimize the objective function:
where Φ denotes the parameters in the trained GNN, K is the total number of sampled graph, C
is the number of labels, and Ĝs(k) is the k-th sampled graph with Eq. (4), parameterized by
Ω.
4.3 Explanation of graph neural networks with a global view
Although explanations provided by the leading method GNNExplainer [53] preserve the local fidelity, they
do not help to understand the general picture of the model across a population [50]. Furthermore, various
GNN based models have been applied to analyze graph data with millions of instances [52], the cost of
applying local explanations one-by-one can be prohibitive with such large datasets in practice. On the other
hand, explanations with a global view of the model ascertain users’ trust [39]. Furthermore, these models
can generalize explanations to new instances without retraining, making it more efficient to explain large
scale datasets.
To have a global view of a GNN model, our method collectively explains predictions made by a trained
model on multiple instances. Instead of treating Ω in Eq. (6) as independent variables, we
utilize a parameterized network to learn to generate explanations from the trained GNN model,
which also applies to unexplained instances. In general, GNN based models first learn node
representations and then feed the vector representations to downstream tasks [21, 25, 45]. We denote
these two functions by GNNEΦ0(⋅) and GNNCΦ1(⋅), respectively. For GNNs without explicit
classification layers, we use the last layer instead. As a result, we can represent a GNN model
with:
Z is the matrix of node representations encoding both features and structure of the input graph, which is
used as an input in the explanation network to calculate the parameter Ω:
Ψ denotes parameters in the explanation network, which is shared by all edges among the population.
Therefore, PGExplainer can be utilized to collectively provide explanations for multiple instances.
Specifically, in the collective setting with instance set  , the objective of PGExplainer is:
, the objective of PGExplainer is:
where G(i) is the input graph and Ĝs(i,k) is the k-th sampled graph with Eq. (4 ,8) for i-th instance. We
consider both graph and node classifications and specify an instantiation for each task. Solutions for other
tasks, such as link prediction, are similar and thus omitted.
Explanation network for node classification. Considering that explanations for nodes in a graph may
appear diverse structures [53], especially for nodes with different labels. For example, an edge (i,j) is
important for the prediction of node u, but not for another node v. Based on this motivation, we implement
the Ω = gΨ(Go,Z) to explain the prediction of node v with:
MLPΨ is a multi-layer neural network parameterized with Ψ and [⋅;⋅] is the concatenation operation.
Explanation network for graph classification. For graph level tasks, each graph is considered as an
instance. The explanation of the prediction of a graph is not conditional to a specific node. Therefore, we
specify the Ω = gΨ(Go,Z) for graph classification as:
With the graph classification as an example, the architecture of PGExplainer is shown in Figure 2. The
algorithms of PGExplainer for node and graph classification can be found in Appendix.
Computational complexity. PGExplainer is more efficient than GNNExplainer for two reasons. First,
PGExplainer learns a latent variable for each edge in the original input graph with a neural network
parameterized by Ψ, which is shared by all edges in the population of input graphs. Different
from GNNExplainer, whose parameter size is linear to the number of edges, the number of
parameters in PGExplainer is irrelevant to the size of the input graph, which makes PGExplainer
applicable to large scale datasets. Further, since the explanation is shared among a population, a
trained PGExplainer can be utilized in the inductive setting to explain new instances without
retraining the explainer. To explain a new instance with || edges in the input graph, the time
complexity of PGExplainer is O(||). As a comparison, GNNExplainer has to retrain for the
new instance, leading to the time complexity of O(T||), where T is the number of epochs for
retraining.
4.4 Regularization
The framework of PGExplainer is flexible with various regularization terms to preserve desired properties
on the explanation. We now discuss the regularization terms as well as their principles.
Size and entropy constraints. Following [53], to obtain compact and succinct explanations, we impose
a constraint on the explanation size by adding ||Ω||1, the l1 norm on latent variables Ω, as a
regularization term. Besides, element-wise entropy is also be applied to further achieve discrete edge
weights [53].
Next, We provide more regularization terms that are compatible with PGExplainer. Note that for a
fair comparison, the following regularization terms are not utilized in experimental studies in
Section 5.
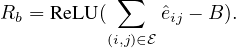
Budget constraint. To obtain a compact explanation, the l1 norm on latent variables Ω is introduced,
which penalizes all edge weights to sparsify the explanatory graph. In cases that a predefined
budget B is available, for example, |Gs|≤ B, we could modify the size constraint to budget
constraint:
When the size of the explanatory graph is smaller than the budget B, the budget regularization Rb = 0. On
the other hand, it works similarly to the size constraint when out of budget.
Connectivity constraint. In many real-life scenarios, determinant motifs are expected to be connected.
Although it is claimed that GNNExplainer empirically tends to detect a small connected subgraph, the
explicit constraints are not provided [53]. We propose to implement the connected constraint with the
cross-entropy of adjacent edges, which connect to the same node. For instance, (i,j) and (i,k) both
connected to the node i. The motivation is that is (i,j) is selected in the the explanatory graph, then its
adjacent edge (i,k) should also be included. Formally, we design the connectivity constraint as:
5 Experimental study
In this section, we evaluate our PGExplainer with a number of experiments. We first describe synthetic and
real-world datasets, baseline methods, and experimental setup. Then, we present the experimental results on
explanations of both node and graph classification. With qualitative and quantitative evaluations, we
demonstrate that our PGExplainer can improve the SOTA method up to 24.7% in AUC on explaining graph
classification. At the same time, with a trained explanation network, our PGExplainer is significantly faster
than the baseline when explaining unexplained instances. We also provide extended experiments to
show deep insights of PGExplainer in the appendix. The code and data used in this work are
available .
5.1 Datasets
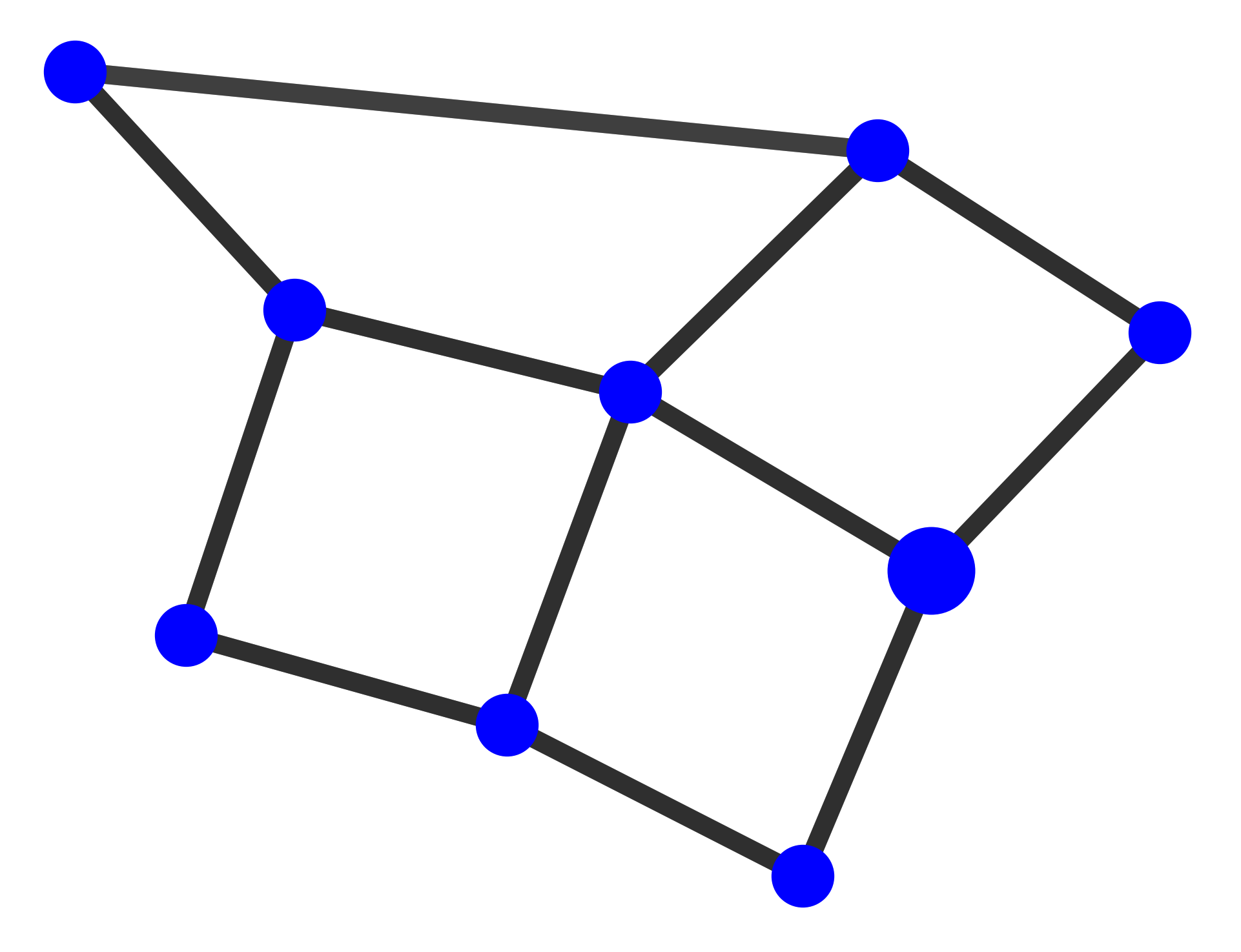
We follow the setting in GNNExplainer and construct four kinds of node classification datasets, BA-Shapes,
BA-Community, Tree-Cycles, and Tree-Grids [53]. Furthermore, we also construct a graph
classification datasets, BA-2motifs. Illustration of synthetic datasets is shown in Table 2. (1)
BA-Shapes is a single graph consisting of a base Barabasi-Albert (BA) graph with 300 nodes and
80 “house”-structured motifs. These motifs are attached to randomly selected nodes from the
BA graph. After that, random edges are added to perturb the graph. Nodes features are not
assigned in BA-Shapes. Nodes in the base graph are labeled with 0; the ones locating at the
top/middle/bottom of the “house” are labeled with 1,2,3, respectively. (2) BA-Community dataset
consists of two BA-Shapes graphs. Two Gaussian distributions are utilized to sample node
features, one for each BA-Shapes graph. Nodes are labeled based on their structural roles and
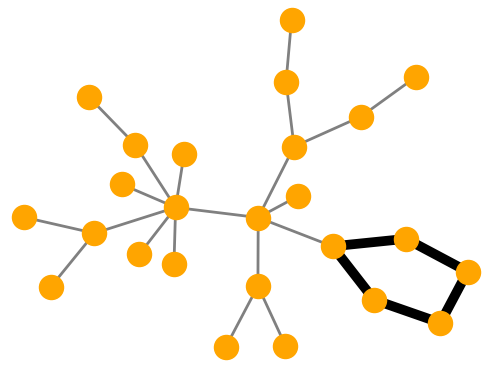
community memberships, leading to 8 classes in total. (3) In the Tree-Cycles dataset, an 8-level
balanced binary tree is adopted as the base graph. A set of 80 six-node cycle motifs are attached to
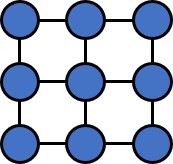
randomly selected nodes from the base graph. (4) Tree-Grid is constructed in the same way as
TREE-CYCLES, except that 3-by-3 grid motifs are used to replace the cycle motifs. (5) For
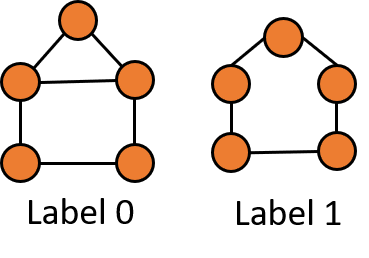
graph classification, we build the BA-2motifs dataset of 800 graphs. We adopt the BA graphs
as base graphs. Half graphs are attached with “house” motifs and the rest are attached with
five-node cycle motifs. Graphs are assigned to one of 2 classes according to the type of attached
motifs.
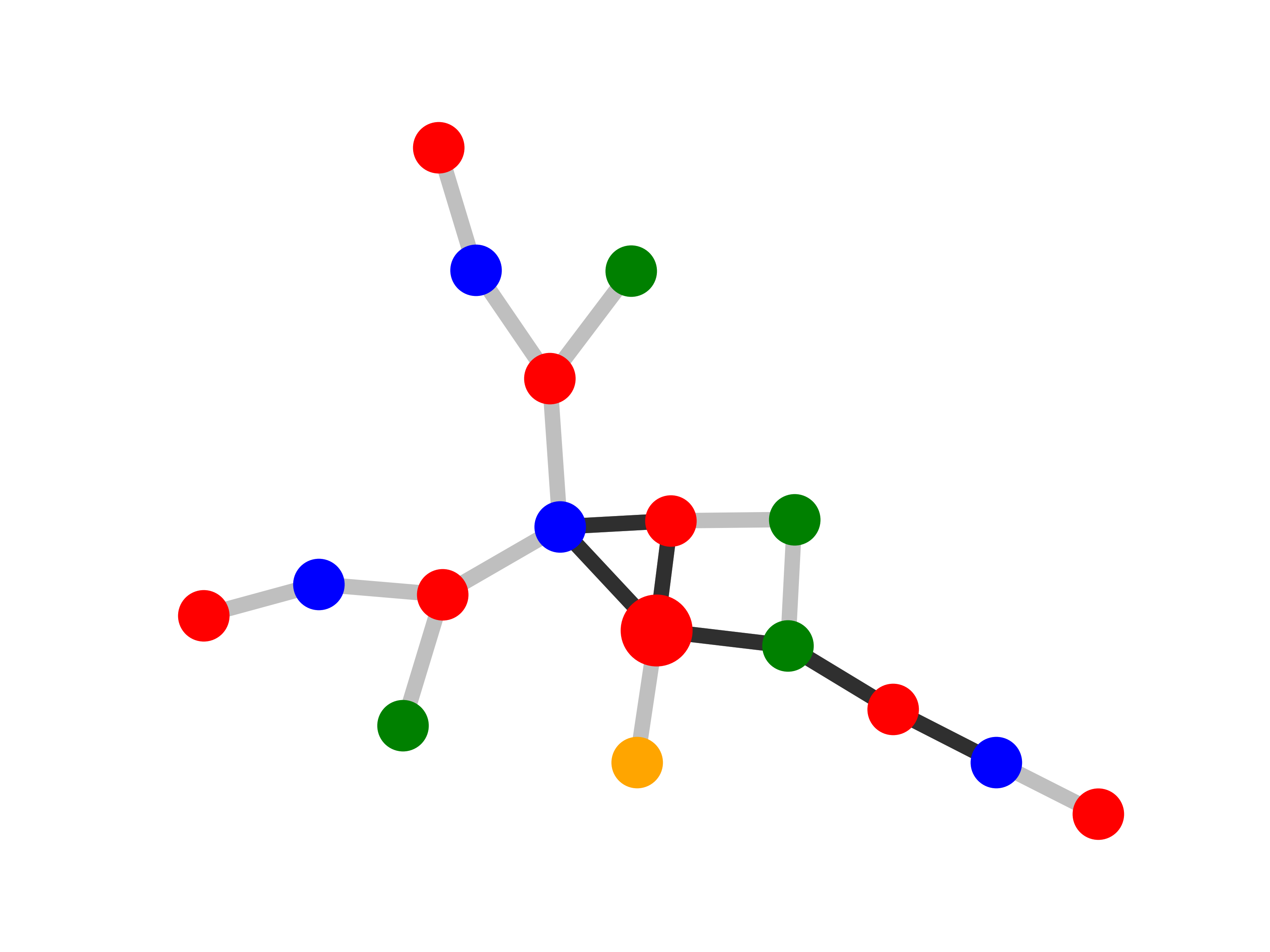
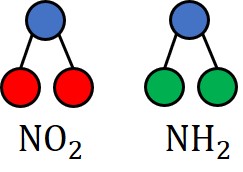
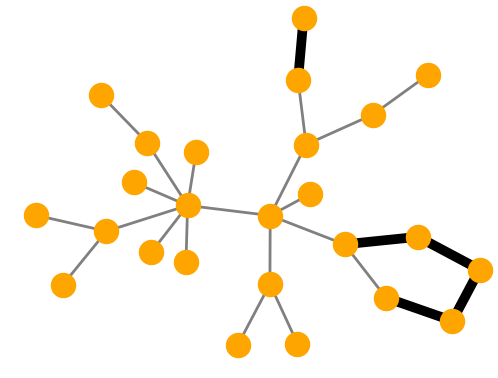
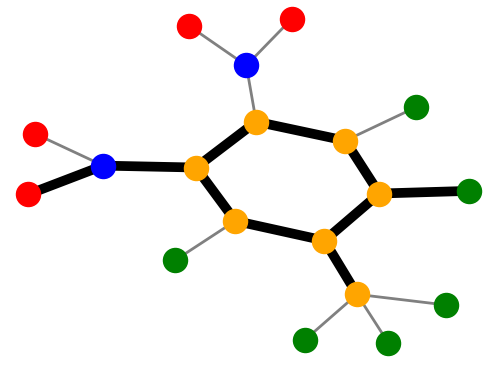
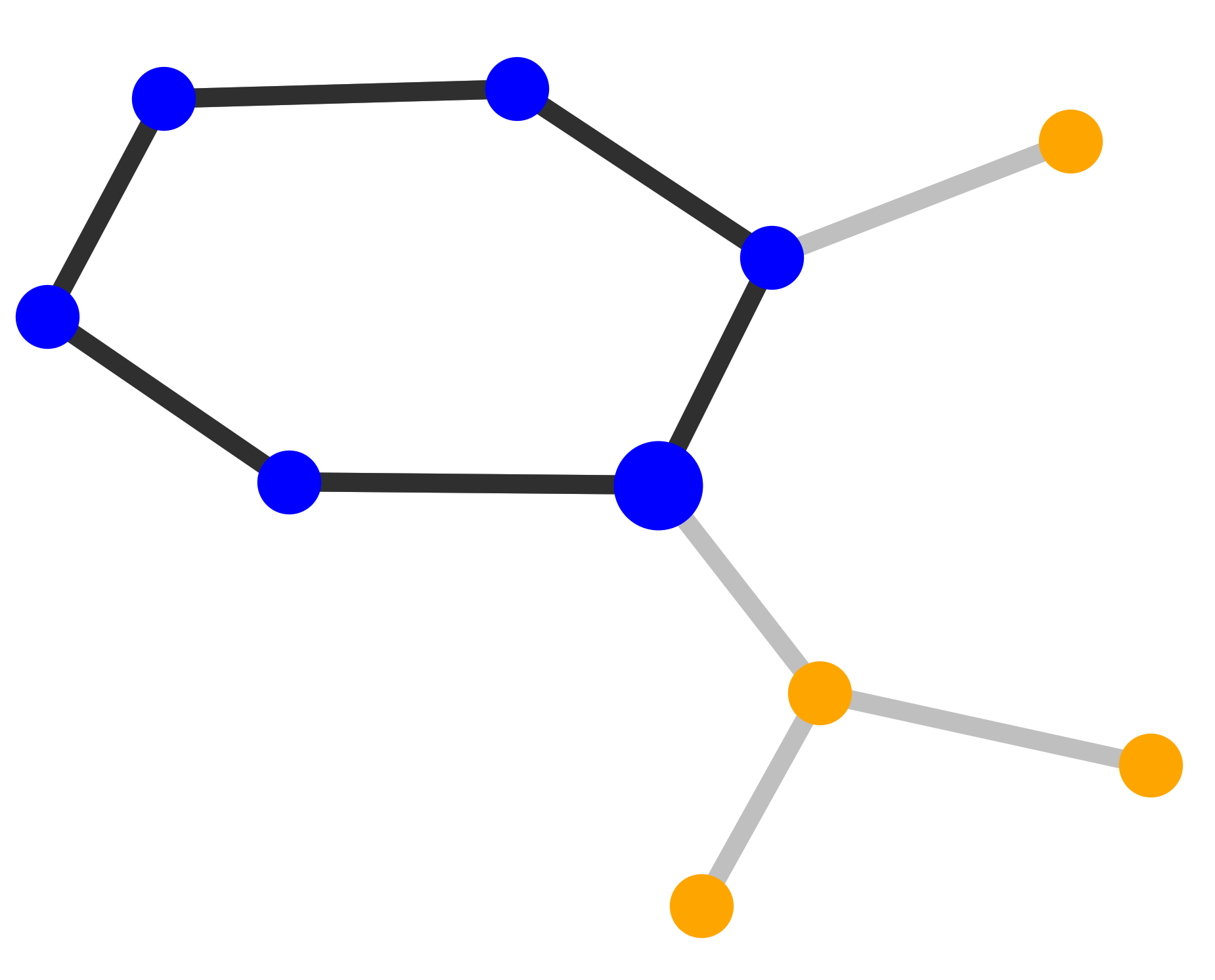
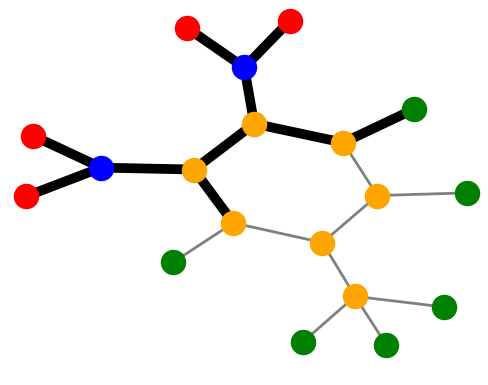
We also include a real-life dataset, MUTAG, for graph classification, which is also used in previous
work [53]. It consists of 4,337 molecule graphs. Each graph is assigned to one of 2 classes
based on its mutagenic effect [53, 40]. As discussed in [53, 9], carbon rings with chemical
groups NH2 or NO2 are known to be mutagenic. We observe that carbon rings exist in both
mutagen and nonmutagenic graphs, which are not discriminative. Thus, we can treat carbon
rings as the shared base graphs and NH2, NO2 as motifs for the mutagen graphs. There are no
explicit motifs for nonmutagenic ones. Table 1 shows the statistics of synthetic and real-life
datasets.
Table 1: Dataset statistics
|
|
|
|
|
|
|
| | Node Classification | Graph Classification
|
| | BA-Shapes | BA-Community | Tree-Cycles | Tree-Grid | BA-2motifs | MUTAG |
|
|
|
|
|
|
|
| #graphs | 1 | 1 | 1 | 1 | 1,000 | 4,337 |
| #nodes | 700 | 1,400 | 871 | 1,231 | 25,000 | 131,488 |
| #edges | 4,110 | 8,920 | 1,950 | 3,410 | 51,392 | 266,894 |
| #labels | 4 | 8 | 2 | 2 | 2 | 2 |
|
|
|
|
|
|
|
| |
5.2 Baselines and experimental setup
Baselines. We compare with the following baseline methods, GNNExplainer [53], a gradient-based
method (GRAD) [53], graph attention network (ATT) [45], and Gradient [38]. (1) GNNExplainer is a
post-hoc method providing explanations for every single instance. (2) GRAD learns weights of edges by
computing gradients of GNN’s objective function w.r.t. the adjacency matrix. (3) ATT utilizes self-attention
layers to distinguish edge attention weights in the input graph. Each edge’s importance is obtained by
averaging its attention weights across all attention layers. (4) We first adopt Gradient in [38] to calculate
the importance of each node, then calculate the importance of an edge by average the connected nodes’
importance scores.
Experimental setup. We follow the experimental settings in GNNExplainer [53]. Specifically, for post-hoc
methods including ATT, GNNExplainer, and PGExplainer, we first train a three-layer GNN and then apply
these methods to explain predictions made by the GNN. Since weights in attention layers are jointly
optimized with the GNN model in ATT, we thus train another GNN model with self-attention
layers. We follow [1] to tune temperature τ. We refer readers to the Appendix for more training
details.
| | Node Classification | Graph Classification
|
| | BA-Shapes | BA-Community | Tree-Cycles | Tree-Grid | BA-2motifs | MUTAG |
| Base | 
| | 
| | | 
|
| Motifs | 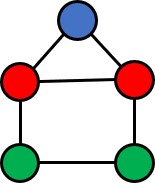
| | 
| 
| 
| 
|
| Features | None |  (μl,σl) (μl,σl)
| None | None | None | Atom types |
| Visualization
| Explanations
by GNN-
Explainer | 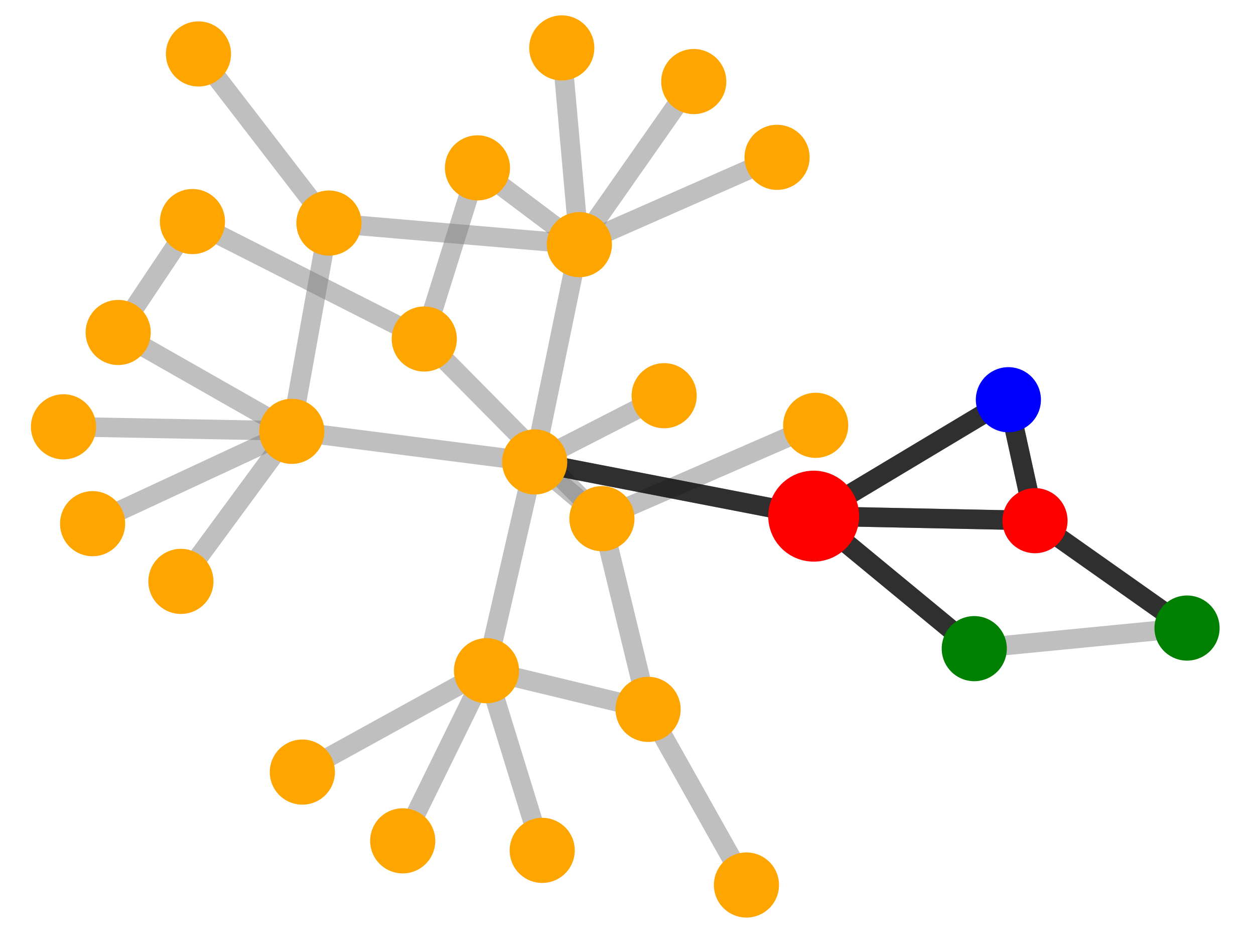
| 
| 
| 
| 
| 
|
| Explanations
by PG-
Explainer | 
| 
| 
| 
| 
| 
|
| |
| Explanation AUC
|
|
|
|
|
|
|
| GRAD | 0.882 | 0.750 | 0.905 | 0.612 | 0.717 | 0.783 |
|
|
|
|
|
|
|
| ATT | 0.815 | 0.739 | 0.824 | 0.667 | 0.674 | 0.765 |
|
|
|
|
|
|
|
| Gradient | - | - | - | - | 0.773 | 0.653 |
|
|
|
|
|
|
|
| GNNExplainer | 0.925 | 0.836 | 0.948 | 0.875 | 0.742 | 0.727 |
|
|
|
|
|
|
|
| PGExplainer | 0.963±0.011 | 0.945±0.019 | 0.987±0.007 | 0.907±0.014 | 0.926±0.021 | 0.873±0.013 |
|
|
|
|
|
|
|
| Improve | 4.1% | 13.0% | 4.1% | 3.7% | 24.7% | 11.5% |
|
|
|
|
|
|
|
| |
| Inference Time (ms)
|
|
|
|
|
|
|
| GNNExplainer | 650.60 | 696.61 | 690.13 | 713.40 | 934.72 | 409.98 |
|
|
|
|
|
|
|
| PGExplainer | 10.92 | 24.07 | 6.36 | 6.72 | 80.13 | 9.68 |
|
|
|
|
|
|
|
| Speed-up | 59x | 29x | 108x | 106x | 12x | 42x |
| |
Table 2: Illustration of different datasets together with performance evaluation of PGExplainer
and other baselines. BA-Shapes, BA-Community, Tree-Cycles, Tree-Grid are datasets for node
classification [53]. Node labels are represented by their colors. BA-2motifs and MUTAG datasets
are used for graph classification. Graphs with “house” motifs are labeled with 0 and the ones with
cycles are with 1 in BA-2motifs dataset. NH2, NO2 are treated as motifs of the mutagen graphs in
MUTAG. Explanations extracted by GNNExplainer and PGExplainer are also shown as case studies.
5.3 Results
The results of comparative evaluation experiments on both synthetic and real-life datasets are summarized
in Table 2. In these datasets, node/graph labels are determined by the motifs, which are treated as ground
truth explanations. These motifs are utilized to calculate explanation accuracy for PGExplainer as well as
other baselines.
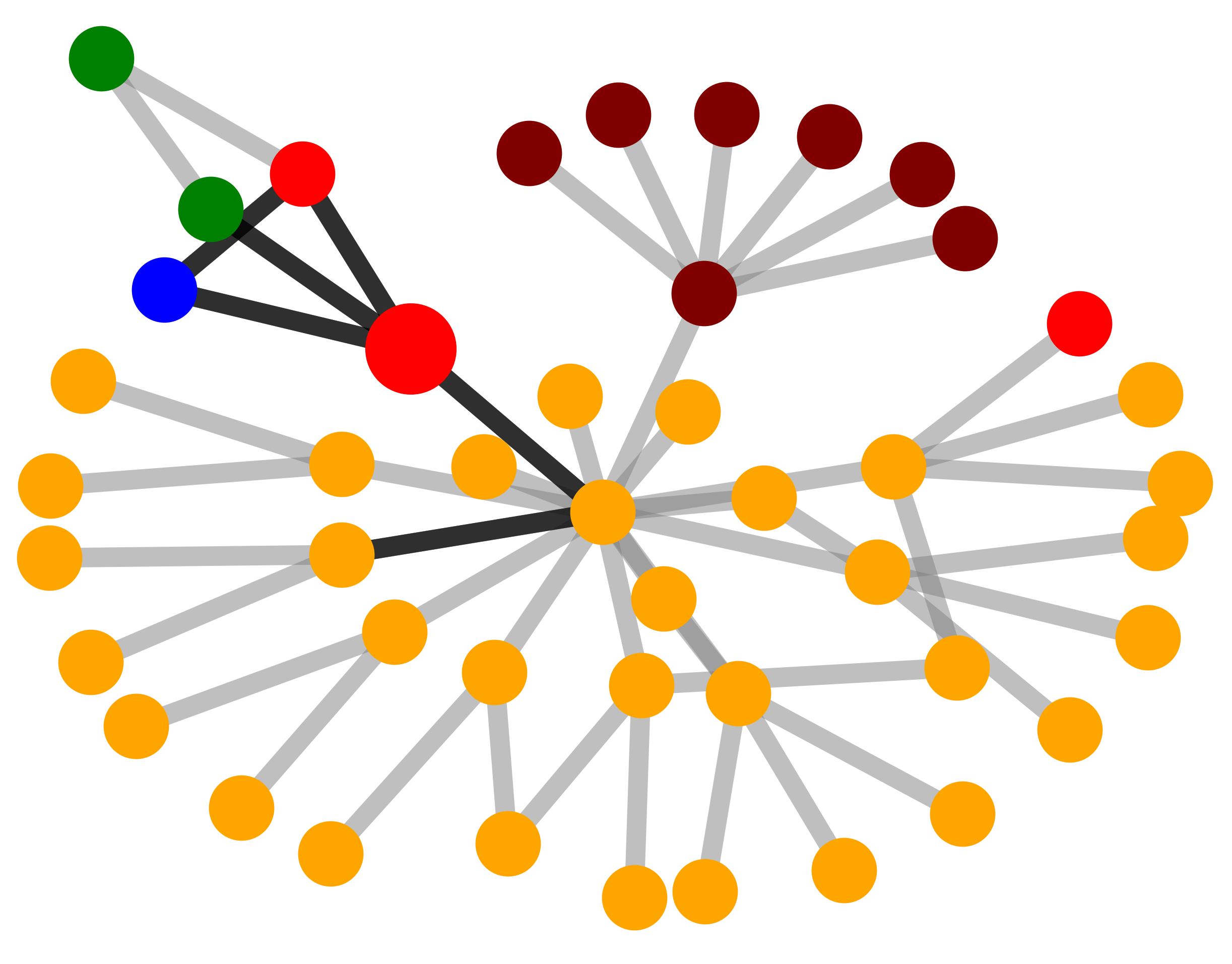
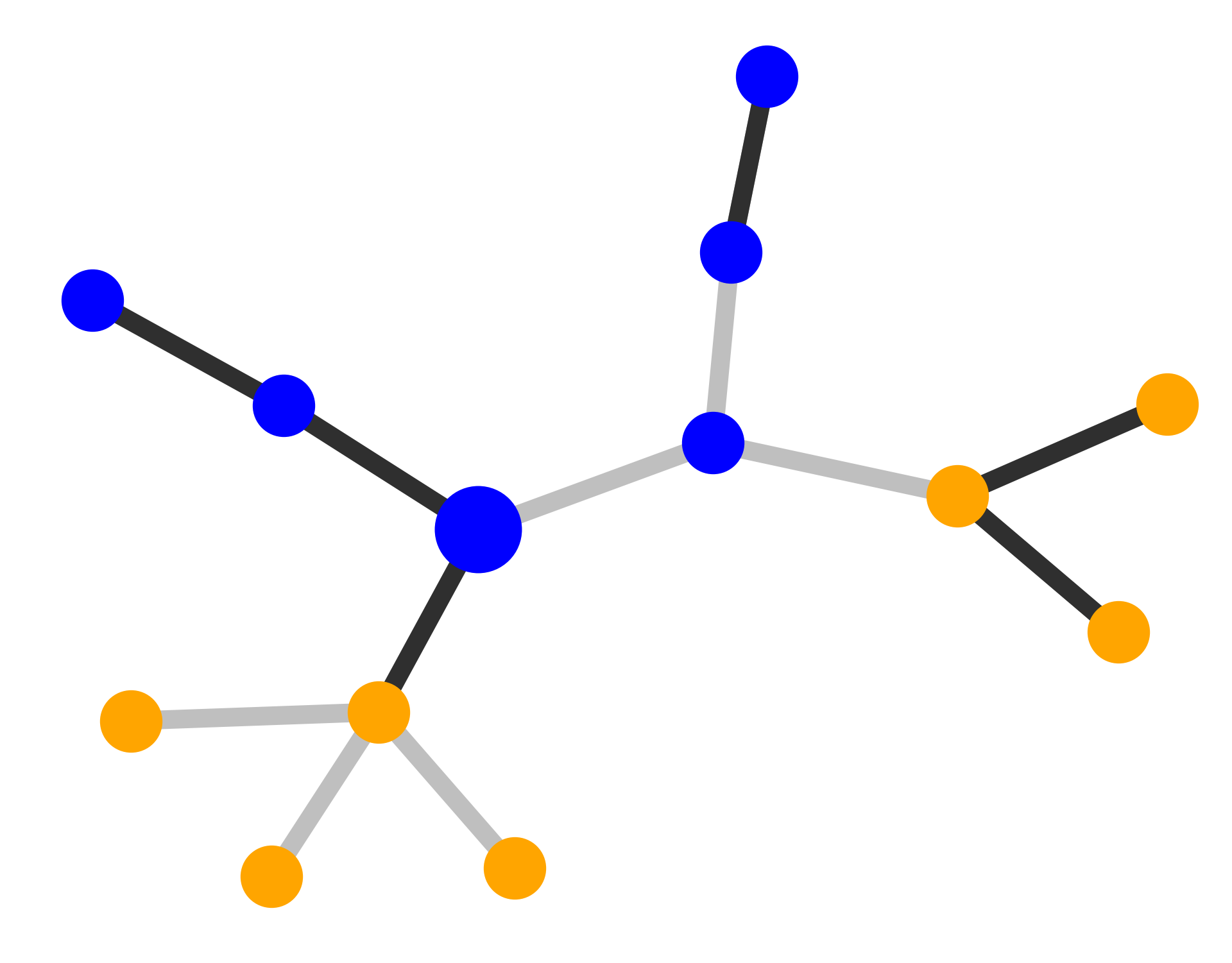
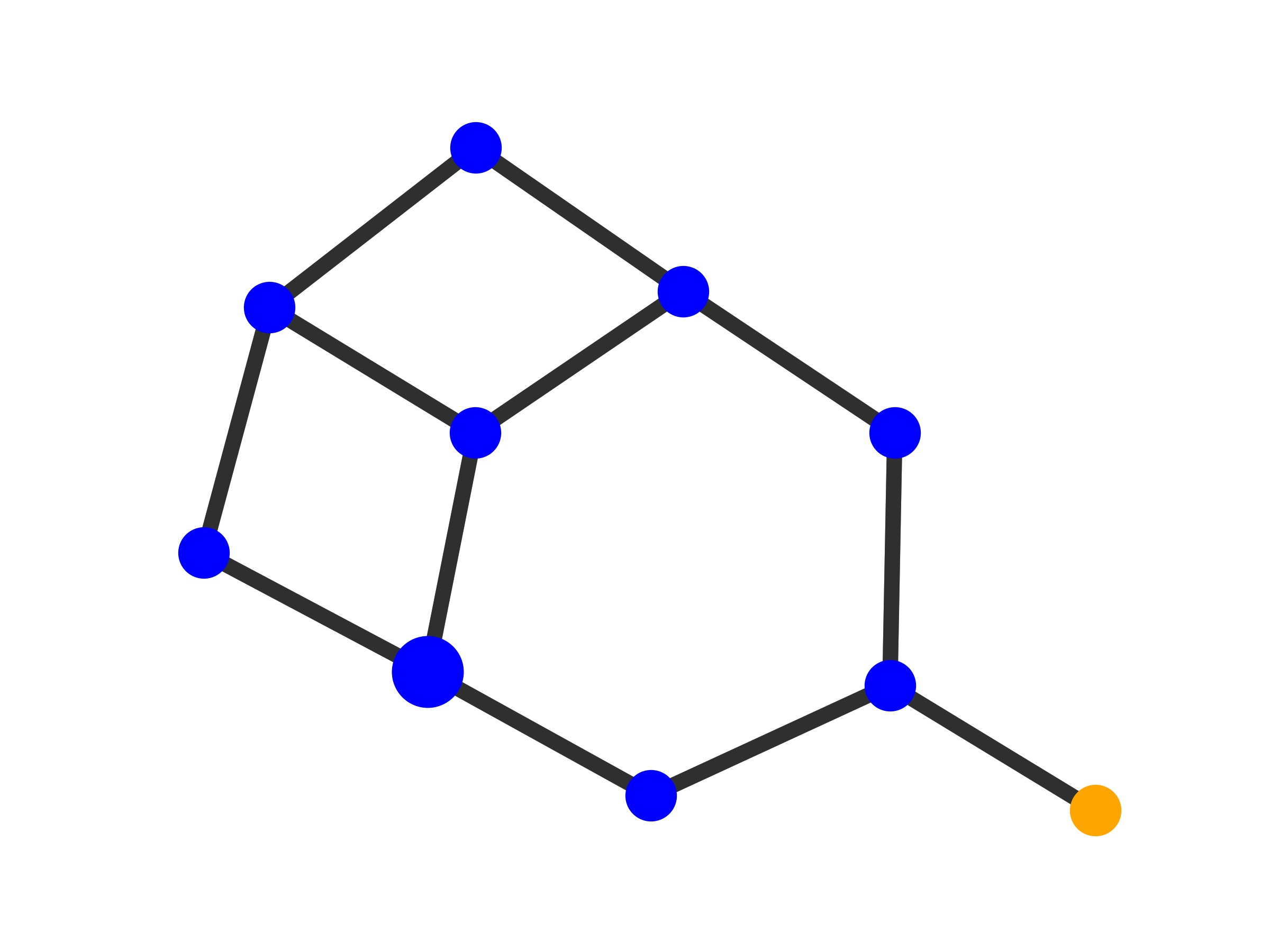
Qualitative evaluation. We choose an instance for each dataset and visualize its explanations given by
GNNExplainer and PGExplainer in Table 2. In these explanations, bold black edges indicate top-K edges
ranked by their importance weights, where K is set to the number of edges inside motifs for synthetic
datasets and 10 for MUTAG [53]. As demonstrated in these figures, the whole motifs, such as “house” in
BA-Shapes and BA-Community, cycles in Tree-Cycles and BA-2motifs, grids in Tree-Grid, and NO2
groups in MUTAG are correctly identified by PGExplainer. On the other hand, some important
edges are missing in the explanations given by GNNExplainer. For example, the explanation
provided by GNNExplainer for the instance in MUTAG contains the carbon rings and part of a
NO2 group. However, the carbon rings appear frequently in both mutagen and nonmutagenic
graphs, which are not discriminative. Conversely, PGExplainer correctly identifies both NO2
groups.
Quantitative evaluation. We follow the experimental settings in GNNExplainer [53] and formalize the
explanation problem as a binary classification of edges. We treat edges inside motifs as positive edges, and
negative otherwise. Importance weights provided by explanation methods are considered as prediction
scores. A good explanation method assigns high weights to edges in the ground truth motifs than the ones
outside. AUC is adopted as the metric for quantitative evaluation. Especially, for the MUTAG dataset, we
only consider the mutagen graphs because no explicit motifs exist in nonmutagenic ones. For PGExplainer,
we repeat each experiment 10 times and report the average AUC scores and standard deviations
here.
From the table, we have the following observations. PGExplainer achieves SOTA performances in all
scenarios and the accuracy gains are up to 13.0% in node classification and 24.7% in graph classification.
Compared to GNNExplainer, which tackles instances independently thus can only achieve suboptimal
explanations, PGExplainer utilizes a parameterized explanation network based upon graph generative
model to collectively provide explanations for multiple instances. As a result, PGExplainer can have a
global view of the GNNs, which answers why PGExplainer can outperform GNNExplainer by relatively
large margins.
Efficiency evaluation. Explanation network in PGExplainer is shared across the population of instances.
Thus, a trained PGExplainer can be utilized to explain new instances in the inductive setting. We denote
the time to explain a new instance with a trained explanation method by inference time. Since
GNNExplainer has to retrain the model, we also count the training time here. The running time
comparison in Table 2 shows that PGExplainer can speed up the computation significantly, up to
108 times faster than GNNExplainer, which makes PGExplainer more practical for large-scale
datasets.
Further experiments on the inductive performance and effects of regularization terms are in
Appendix.
6 Conclusion
We present PGExplainer, a parameterized method to provide a global understanding of any GNN models on
arbitrary machine learning tasks by collectively explaining multiple instances. We show that PGExplainer
can leverage the representations produced by GNNs to learn the underlying subgraphs that are important to
the predictions made by GNNs. Furthermore, PGExplainer is more efficient due to its capacity to
explain GNNs in the inductive settings, which makes PGExplainer more practical in real-life
applications.
Acknowledgement
This project was partially supported by NSF projects IIS-1707548 and CBET-1638320.
Broader impact
Graph neural networks are powerful tools that have been applied in various real-world applications,
including community detection, recommendation systems, computer vision, and natural language
processing [3, 13, 30, 51]. Our work can not only provide interpretable explanations with local
fidelity for predictions made by GNN models, but also improve the global understanding of the
model.
There are several broader impacts of using our method to explain predictions made by GNNs. First, our
method can increase the transparency of applying GNNs for decision-critical applications, such as drug
discovery and diagnosis. As a result, our method can help alleviate safety, and fairness risks. For
example, as we show in our experiments, we could correctly identify motifs that have determinant
effects on the mutagenicity of molecules. On the other hand, our method also puts GNN models
at a high risk of being attacked. Our method extracts subgraphs that are important to GNNs’
behaviors. Disturbing these parts leads to significant changes in GNNs’ predictions. Besides,
increasing the interpretability of GNNs may cause automation bias, such as an undue trust on GNN
models.
References
[1] Abubakar Abid, Muhammad Fatih Balin, and James Zou. Concrete autoencoders for
differentiable feature selection and reconstruction. arXiv preprint arXiv:1901.09346, 2019.
[2] Raman Arora and Jalaj Upadhyay. On differentially private graph sparsification and
applications. In NeurIPS, pages 13378–13389, 2019.
[3] Joan Bruna and X Li. Community detection with graph neural networks. Stat, 1050:27,
2017.
[4] Joan Bruna, Wojciech Zaremba, Arthur Szlam, and Yann LeCun. Spectral networks and
locally connected networks on graphs. arXiv preprint arXiv:1312.6203, 2013.
[5] Rich Caruana, Yin Lou, Johannes Gehrke, Paul Koch, Marc Sturm, and Noemie Elhadad.
Intelligible models for healthcare: Predicting pneumonia risk and hospital 30-day readmission.
In KDD, pages 1721–1730, 2015.
[6] Jianbo Chen, Le Song, Martin J Wainwright, and Michael I Jordan. Learning to
explain: An information-theoretic perspective on model interpretation. arXiv preprint
arXiv:1802.07814, 2018.
[7] L Paul Chew. There are planar graphs almost as good as the complete graph. Journal of
Computer and System Sciences, 39(2):205–219, 1989.
[8] Piotr Dabkowski and Yarin Gal. Real time image saliency for black box classifiers. In
NIPS, pages 6967–6976, 2017.
[9] Asim Kumar Debnath, Rosa L Lopez de Compadre, Gargi Debnath, Alan J Shusterman,
and Corwin Hansch. Structure-activity relationship of mutagenic aromatic and heteroaromatic
nitro compounds. correlation with molecular orbital energies and hydrophobicity. Journal of
medicinal chemistry, 34(2):786–797, 1991.
[10] Michaël Defferrard, Xavier Bresson, and Pierre Vandergheynst. Convolutional neural
networks on graphs with fast localized spectral filtering. In NIPS, pages 3844–3852, 2016.
[11] P ERDdS and A R&wi. On random graphs i. Publ. Math. Debrecen, 6(290-297):18,
1959.
[12] D. Erhan, Y. Bengio, A. Courville, and P. Vincent. Visualizing higher-layer features of
a deep network. University of Montreal, 1341(3):1, 2019.
[13] Wenqi Fan, Yao Ma, Qing Li, Yuan He, Eric Zhao, Jiliang Tang, and Dawei Yin. Graph
neural networks for social recommendation. In The Web Conference, pages 417–426, 2019.
[14] Ruth C Fong and Andrea Vedaldi. Interpretable explanations of black boxes by meaningful
perturbation. In ICCV, pages 3429–3437, 2017.
[15] Edgar N Gilbert. Random graphs. The Annals of Mathematical Statistics,
30(4):1141–1144, 1959.
[16] Justin Gilmer, Samuel S Schoenholz, Patrick F Riley, Oriol Vinyals, and George E Dahl.
Neural message passing for quantum chemistry. In ICML, pages 1263–1272, 2017.
[17] Marco Gori, Gabriele Monfardini, and Franco Scarselli. A new model for learning in graph
domains. In IJCNN, volume 2, pages 729–734. IEEE, 2005.
[18] Aditya Grover, Aaron Zweig, and Stefano Ermon. Graphite: Iterative generative modeling
of graphs. In ICML, 2019.
[19] Wenbo Guo, Sui Huang, Yunzhe Tao, Xinyu Xing, and Lin Lin. Explaining deep learning
models–a bayesian non-parametric approach. In NeurIPS, pages 4514–4524, 2018.
[20] Wenbo Guo, Dongliang Mu, Jun Xu, Purui Su, Gang Wang, and Xinyu Xing. Lemna:
Explaining deep learning based security applications. In CCS, pages 364–379, 2018.
[21] Will Hamilton, Zhitao Ying, and Jure Leskovec. Inductive representation learning on large
graphs. In NIPS, pages 1024–1034, 2017.
[22] Gecia Bravo Hermsdorff and Lee M Gunderson. A unifying framework for
spectrum-preserving graph sparsification and coarsening. arXiv preprint arXiv:1902.09702,
2019.
[23] Peter D Hoff, Adrian E Raftery, and Mark S Handcock. Latent space approaches to social
network analysis. Journal of the american Statistical association, 97(460):1090–1098, 2002.
[24] Eric Jang, Shixiang Gu, and Ben Poole. Categorical reparameterization with
gumbel-softmax. arXiv preprint arXiv:1611.01144, 2016.
[25] Thomas N Kipf and Max Welling. Semi-supervised classification with graph convolutional
networks. arXiv preprint arXiv:1609.02907, 2016.
[26] Himabindu Lakkaraju, Ece Kamar, Rich Caruana, and Jure Leskovec. Interpretable &
explorable approximations of black box models. CoRR, abs/1707.01154, 2017.
[27] Jure Leskovec, Jon Kleinberg, and Christos Faloutsos. Graphs over time: densification
laws, shrinking diameters and possible explanations. In KDD, pages 177–187, 2005.
[28] Jiwei Li, Will Monroe, and Dan Jurafsky. Understanding neural networks through
representation erasure. arXiv preprint arXiv:1612.08220, 2016.
[29] Ruoyu Li, Sheng Wang, Feiyun Zhu, and Junzhou Huang. Adaptive graph convolutional
neural networks. In AAAI, 2018.
[30] Chundi Liu, Guangwei Yu, Maksims Volkovs, Cheng Chang, Himanshu Rai, Junwei Ma,
and Satya Krishna Gorti. Guided similarity separation for image retrieval. In NeurIPS, pages
1554–1564, 2019.
[31] Scott Lundberg and Su-In Lee. A unified approach to interpreting model predictions. NIPS,
2017.
[32] Scott M Lundberg and Su-In Lee. A unified approach to interpreting model predictions.
In NIPS, pages 4765–4774, 2017.
[33] Dongsheng Luo, Yuchen Bian, Yaowei Yan, Xiao Liu, Jun Huan, and Xiang Zhang. Local
community detection in multiple networks. In KDD, 2020.
[34] Jianxin Ma, Peng Cui, Kun Kuang, Xin Wang, and Wenwu Zhu. Disentangled graph
convolutional networks. In ICML, pages 4212–4221, 2019.
[35] Jiaqi Ma, Weijing Tang, Ji Zhu, and Qiaozhu Mei. A flexible generative framework for
graph-based semi-supervised learning. In NeurIPS, pages 3276–3285, 2019.
[36] Chris J Maddison, Andriy Mnih, and Yee Whye Teh. The concrete distribution: A
continuous relaxation of discrete random variables. arXiv preprint arXiv:1611.00712, 2016.
[37] Mark Newman. Networks. Oxford university press, 2018.
[38] Phillip E Pope, Soheil Kolouri, Mohammad Rostami, Charles E Martin, and Heiko
Hoffmann. Explainability methods for graph convolutional neural networks. In CVPR, 2019.
[39] Marco Tulio Ribeiro, Sameer Singh, and Carlos Guestrin. " why should i trust you?"
explaining the predictions of any classifier. In KDD, pages 1135–1144, 2016.
[40] Kaspar Riesen and Horst Bunke. Iam graph database repository for graph based pattern
recognition and machine learning. In Joint IAPR International Workshops on Statistical
Techniques in Pattern Recognition (SPR) and Structural and Syntactic Pattern Recognition
(SSPR), pages 287–297. Springer, 2008.
[41] Franco Scarselli, Marco Gori, Ah Chung Tsoi, Markus Hagenbuchner, and Gabriele
Monfardini. The graph neural network model. IEEE TNN, 20(1):61–80, 2008.
[42] David I Shuman, Sunil K Narang, Pascal Frossard, Antonio Ortega, and Pierre
Vandergheynst. The emerging field of signal processing on graphs: Extending
high-dimensional data analysis to networks and other irregular domains. IEEE signal
processing magazine, 30(3):83–98, 2013.
[43] Mukund Sundararajan, Ankur Taly, and Qiqi Yan. Axiomatic attribution for deep networks.
ICML, 2017.
[44] David C Van Essen, Stephen M Smith, Deanna M Barch, Timothy EJ Behrens, Essa
Yacoub, Kamil Ugurbil, Wu-Minn HCP Consortium, et al. The wu-minn human connectome
project: an overview. Neuroimage, 2013.
[45] Petar Veličković, Guillem Cucurull, Arantxa Casanova, Adriana Romero, Pietro Lio, and
Yoshua Bengio. Graph attention networks. arXiv preprint arXiv:1710.10903, 2017.
[46] Chi-Jen Wang, Seokjoo Chae, Leonid A Bunimovich, and Benjamin Z Webb. Uncovering
hierarchical structure in social networks using isospectral reductions. arXiv preprint
arXiv:1801.03385, 2017.
[47] Dongkuan Xu, Wei Cheng, Dongsheng Luo, Yameng Gu, Xiao Liu, Jingchao Ni, Bo Zong,
Haifeng Chen, and Xiang Zhang. Adaptive neural network for node classification in dynamic
networks. In ICDM, 2019.
[48] Dongkuan Xu, Wei Cheng, Dongsheng Luo, Xiao Liu, and Xiang Zhang. Spatio-temporal
attentive rnn for node classification in temporal attributed graphs. In IJCAI, 2019.
[49] Keyulu Xu, Weihua Hu, Jure Leskovec, and Stefanie Jegelka. How powerful are graph
neural networks? arXiv preprint arXiv:1810.00826, 2018.
[50] Chengliang Yang, Anand Rangarajan, and Sanjay Ranka. Global model interpretation via
recursive partitioning. In HPCC, pages 1563–1570. IEEE, 2018.
[51] Liang Yao, Chengsheng Mao, and Yuan Luo. Graph convolutional networks for text
classification. In AAAI, volume 33, pages 7370–7377, 2019.
[52] Rex Ying, Ruining He, Kaifeng Chen, Pong Eksombatchai, William L Hamilton, and Jure
Leskovec. Graph convolutional neural networks for web-scale recommender systems. In KDD,
pages 974–983, 2018.
[53] Zhitao Ying, Dylan Bourgeois, Jiaxuan You, Marinka Zitnik, and Jure Leskovec.
Gnnexplainer: Generating explanations for graph neural networks. In NeurIPS, pages
9240–9251, 2019.
[54] Jiaxuan You, Rex Ying, Xiang Ren, William L Hamilton, and Jure Leskovec. Graphrnn:
Generating realistic graphs with deep auto-regressive models. In ICML, 2018.
[55] Hao Yuan, Jiliang Tang, Xia Hu, and Shuiwang Ji. Xgnn: Towards model-level
explanations of graph neural networks. In KDD, 2020.
[56] Muhan Zhang and Yixin Chen. Link prediction based on graph neural networks. In
NeurIPS, pages 5165–5175, 2018.
Supplementary Material: Parameterized Explainer for
Graph Neural Network
<div class="appendices">
</div>
A. Explanation algorithms
The algorithms of PGExplainer for node and graph classification are shown in Algorithm 1 and 2,
respectively.
_______________________________________________________________________________________________________________________________________________________________
Algorithm 1: Training algorithm for explaining node classification__________________________________________________
1
1:
Input:
The
input
graph
Go = ( ,
, ),
node
features
X,
node
labels
Y ,
the
set
of
instances
to
be
explained
),
node
features
X,
node
labels
Y ,
the
set
of
instances
to
be
explained
 ,
a
trained
GNN
model:
GNNEΦ0(⋅)
and
GNNCΦ1(⋅).
2: for each node i ∈ do
,
a
trained
GNN
model:
GNNEΦ0(⋅)
and
GNNCΦ1(⋅).
2: for each node i ∈ do
3:
Go(i) ←
extract
the
computation
graph
for
node
i.
4:
Z(i) ← GNNE
Φ0(Go(i),X).
5:
Y o(i) ← GNNC
Φ1(Z(i)).
6: end for
7: for each epoch do
8: for each node i ∈ do
9:
Ω ←
latent
variables
calculated
with
Eq. (10)
10: for k ← 1 to K do
11:
Ĝs(i,k) ←
sampled
from
Eq. (4).
12:
Ŷs(i,k) ← GNNC
Φ1(GNNEΦ0(Ĝs(i,k),X))
13: end for
14: end for
15: Compute loss with Eq. (9).
16: Update parameters Ψ with backpropagation.
17: end for
2 _________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
We first discuss the node classification in Algorithm 1. In GNNs with message passing mechanisms, the
prediction at a node v is fully determined by its local computation graph, which is defined by
its L-hop neighborhoods [53]. L is the number of GNN layers. Thus, for each node i in the
instance set to be explained, we first extract a local computation graph Go(i) (line 3). With
Go(i) as the input graph, the trained GNN model generates the label of node i, denoted by
Y o(i) (line 4-5). To train the explanation network, each time we select a node i and compute
parameters Ω in edge distributions with Eq. (10) (line 9). After that, we sample K graphs as input
graphs for GNN to get updated predictions for node i, with the k-th prediction denoted by Ŷs(i,k)
(line 11-13). We compute the loss and update parameters Ψ in the explanation network in line
15-16.
_______________________________________________________________________________________________________________________________________________________________
Algorithm 2: Training algorithm for explaining graph classification
1
1:
Input:
A
set
of
input
graphs
with
i-th
graph
represented
by
Go(i),
node
features
X(i),
and
a
label
Y (i),
a
trained
GNN
model:
GNNEΦ0(⋅)
and
GNNCΦ1(⋅).
2: for each graph Go(i) do
3:
Z(i) ← GNNE
Φ0(Go(i),X(i)).
4:
Y o(i) ← GNNC
Φ1(Z(i)).
5: end for
6: for each epoch do
7: for each graph Go(i) do
8:
Ω ←
latent
variables
calculated
with
Eq. (11)
9: for k ← 1 to K do
10:
Ĝs(i,k) ←
sampled
from
Eq.
(4).
11:
Ŷs(i,k) ← GNNC
Φ1(GNNEΦ0(Ĝs(i,k),X(i)))
12: end for
13: end for
14: Compute loss with Eq. (9).
15: Update parameters Ψ with backpropagation.
16: end for
2 _________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
The training algorithm for explaining graph classification is shown in Algorithm 2. The algorithm is similar
to the one explaining node classifications, except that computation graphs are not used, because, for graph
classification, each graph is treated as an instance. Given a set of graphs {Go(i)}i∈ , we first compute the
node embeddings Z(i) and graph labels Y o(i) with the trained GNN model (line 2-4). In each epoch, for
each i-th graph, we compute the parameters Ω in its edge distributions with Eq. 11 (line 8). We then sample
K subgraphs and get the updated predictions. We compute the loss with Eq. (9) and update parameters Ψ
with backpropagation.
, we first compute the
node embeddings Z(i) and graph labels Y o(i) with the trained GNN model (line 2-4). In each epoch, for
each i-th graph, we compute the parameters Ω in its edge distributions with Eq. 11 (line 8). We then sample
K subgraphs and get the updated predictions. We compute the loss with Eq. (9) and update parameters Ψ
with backpropagation.
B. Hardware and implementations in experiments
All experiments are conducted on a Linux machine with an Nvidia GeForce RTX 2070 SUPER GPU with
8GB memory. CUDA version is 10.2 and Driver Version is 440.64.00. PGExplainer is implemented with
Tensorflow 2.0.0. For each dataset, we first train a GNN model, which is then shared by all posthoc methods
ATT, GNNExplainer, and PGExplainer. We use FC(a,b,f) to denote a fully-connected layer. a and b are
the numbers of input and output neurons respectively. f is the activation function. Similarly, we
denote a GNN layer with input dimension a, output dimension b, and activation function f by
GNN(a,b,f). With these notations, the network structure of the GNN model for node classification is
GNN(10, 20, ReLU)-GNN(20, 20, ReLU)-GNN(20, 20, ReLU)-FC(20, #label, softmax). For
graph classification, we add a maxpooling layer to get graph representations before the final FC
layer. Thus, the network structure is GNN(10, 20, ReLU)-GNN(20, 20, ReLU)-GNN(20, 20,
ReLU)-Maxpooling-FC(20, #label, softmax). We adopt the Adam optimizer with the initial learning
rate of 1.0 × 10-3. All variables are initialized with Xavier. We follow GNNExplainer to split
train/validation/test with 80/10/10% for all datasets. Each model is trained for 1000 epochs. The
accuracy performances of GNN models are shown in Table 3. The results show that the designed
GNN models are powerful enough for node/graph classifications on both synthetic and real-life
datasets.
Table 3: Accuracy performance of GNN models
|
|
|
|
|
|
|
| | Node Classification | Graph Classification
|
| Accuracy | BA-Shapes | BA-Community | Tree-Cycles | Tree-Grid | BA-2motifs | MUTAG |
|
|
|
|
|
|
|
| Training | 0.98 | 0.99 | 0.99 | 0.92 | 1.00 | 0.87 |
| Validation | 1.00 | 0.88 | 1.00 | 0.94 | 1.00 | 0.89 |
| Testing | 0.97 | 0.93 | 0.99 | 0.94 | 1.00 | 0.87 |
|
|
|
|
|
|
|
| |
The network structure of explanation networks in PGExplainer is FC(#input, 64, ReLU)-FC(20, 1, Linear),
which is shared for all datasets. #input is 60 for node classification, and 40 for graph classification.To train
PGExplainer, we also adopt the Adam optimizer with the initial learning rate of 3.0 × 10-3. The coefficient
of size regularization is set to 0.05 and entropy regularization is 1.0. The epoch T is set to 30 for all
datasets. The temperature τ in Eq. (4) is set with annealing schedule [1]: τ(t) = τ0(τT∕τ0)t, where τ0 and
τT are the initial and final temperatures. A small temperature tends to generate more discrete graphs which
may hinder the explanation network being optimized with backpropagation. In this task, we
find that relatively high temperatures work well in practice. τ0 is set to 5.0 and τT is set to
2.0.
C. Additional experiments
In this part, we conduct extensive experiments to have deep insights into our PGExplainer.
C.1 Inductive performance
As we discussed in Section 4.3, the explanation network is shared across the population. Thus, with a
trained PGExplainer, we can directly infer the explanation without retraining the explanation network. As a
result, our PGExplainer has better generalization power than the leading baseline GNNExplainer. Besides,
our PGExplainer is more efficient in the inductive setting. In this section, we empirically demonstrate
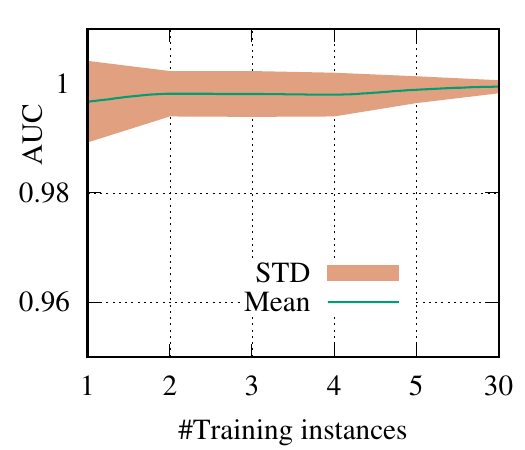
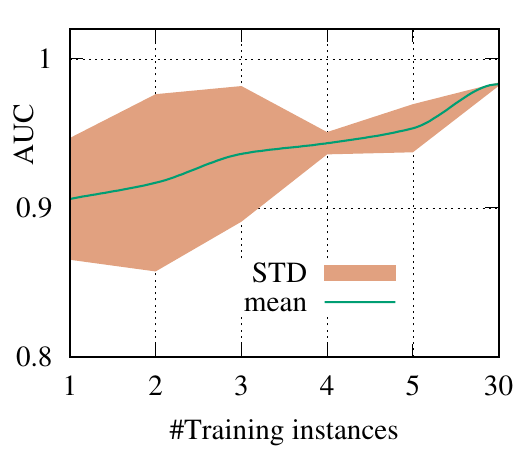
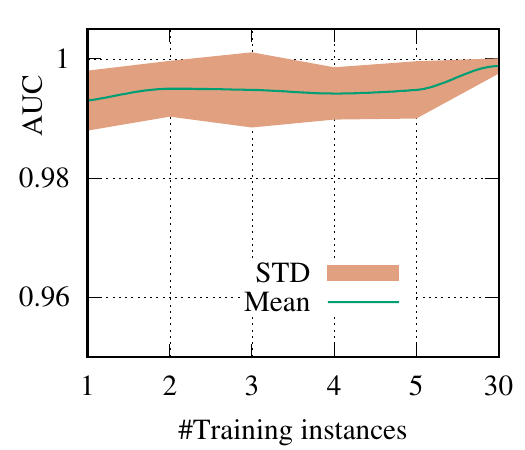
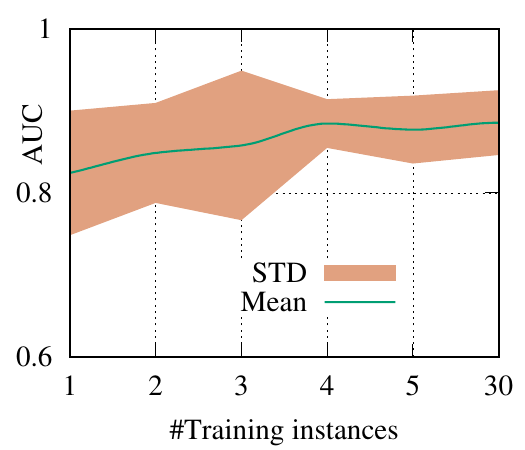
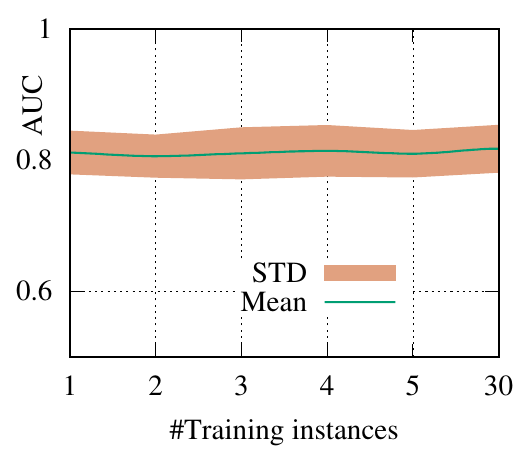
the effectiveness of PGExplainer in the inductive setting. In the inductive setting, we select
α instances for training, (N - α)∕2 for validation, and the rest for testing. α is ranged from
[1,2,3,4,5,30]. Note that, with α = 1, our method degenerates to the single-instance explanation method.
Recall that to explain a set of instances, GNNExplainer first detects a reference node and then
computes the explanation for the reference node. The explanation is then generalized to other nodes
with graph alignment [53]. We claim that it may lead to sub-optimal explanations because
reference node selection and graph alignment are not jointly optimized with the explanation in an
end-to-end fashion. The AUC scores of PGExplainer are shown in Figure 3. We have the following
observations. 1) The testing AUC increase as more instances are trained, verifying the effectiveness of
PGExplainer. Some results are higher than the reported ones in Section 5 because here we
adopt validation datasets to fine-tune the hyper-parameters. 2) More training instances lead to
smaller standard deviation and PGExplainer tends to globally detect shared motifs with higher
robustness. 3) PGExplainer can achieve relatively good performance with a small number of
trained instances, which makes PGExplainer more practical in large datasets. The results also
explain why we dismiss the training time of PGExplainer and only count the inference time in
Section 5.
C.2 Effects of regularization terms
In this part, we analyze the effects of regularization terms. In addition to the size and entropy regularizers
introduced in GNNExplainer, we also have discussed regularization terms on budgets and connectivity
constraints. Since the first two regularizers are used in the quantitative evaluation, we first conduct
parameter studies. Visualization results on synthetic datasets show that the explanatory graph extract by
PGExplainer tends to be small and compact. To verify the effectiveness of the proposed regularizer for
connectivity constraint, we synthesize a noisy BA-Shapes dataset.
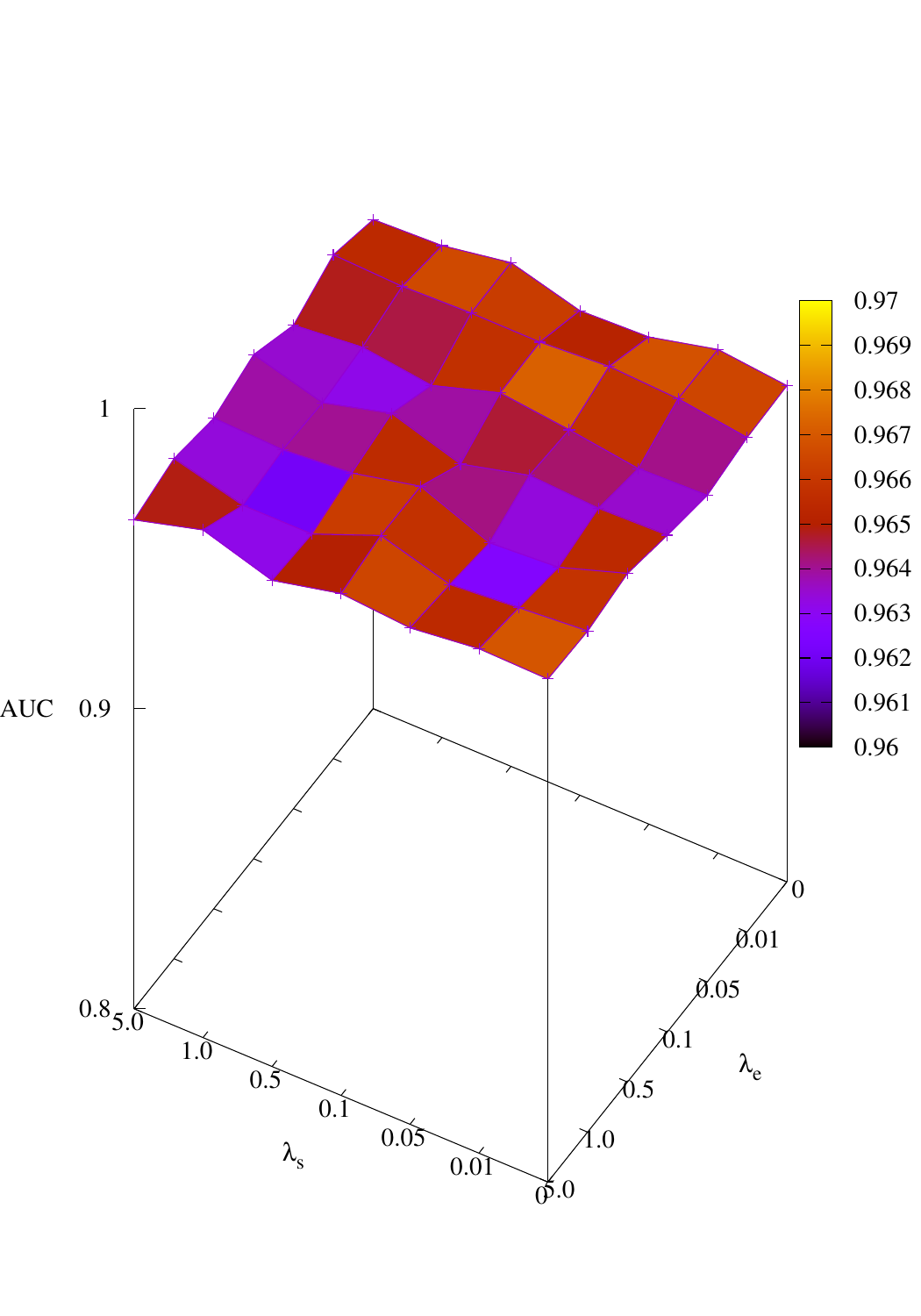
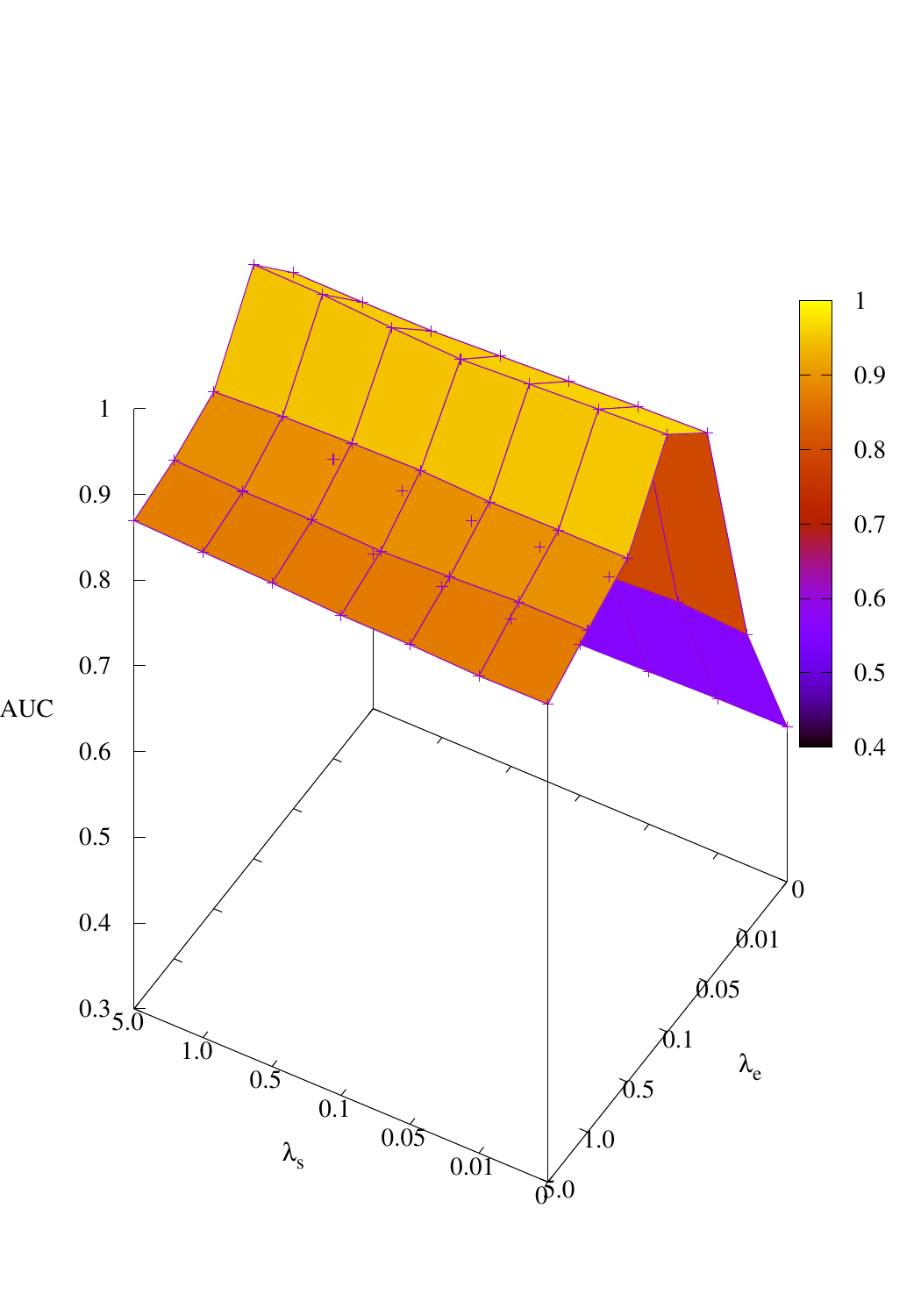
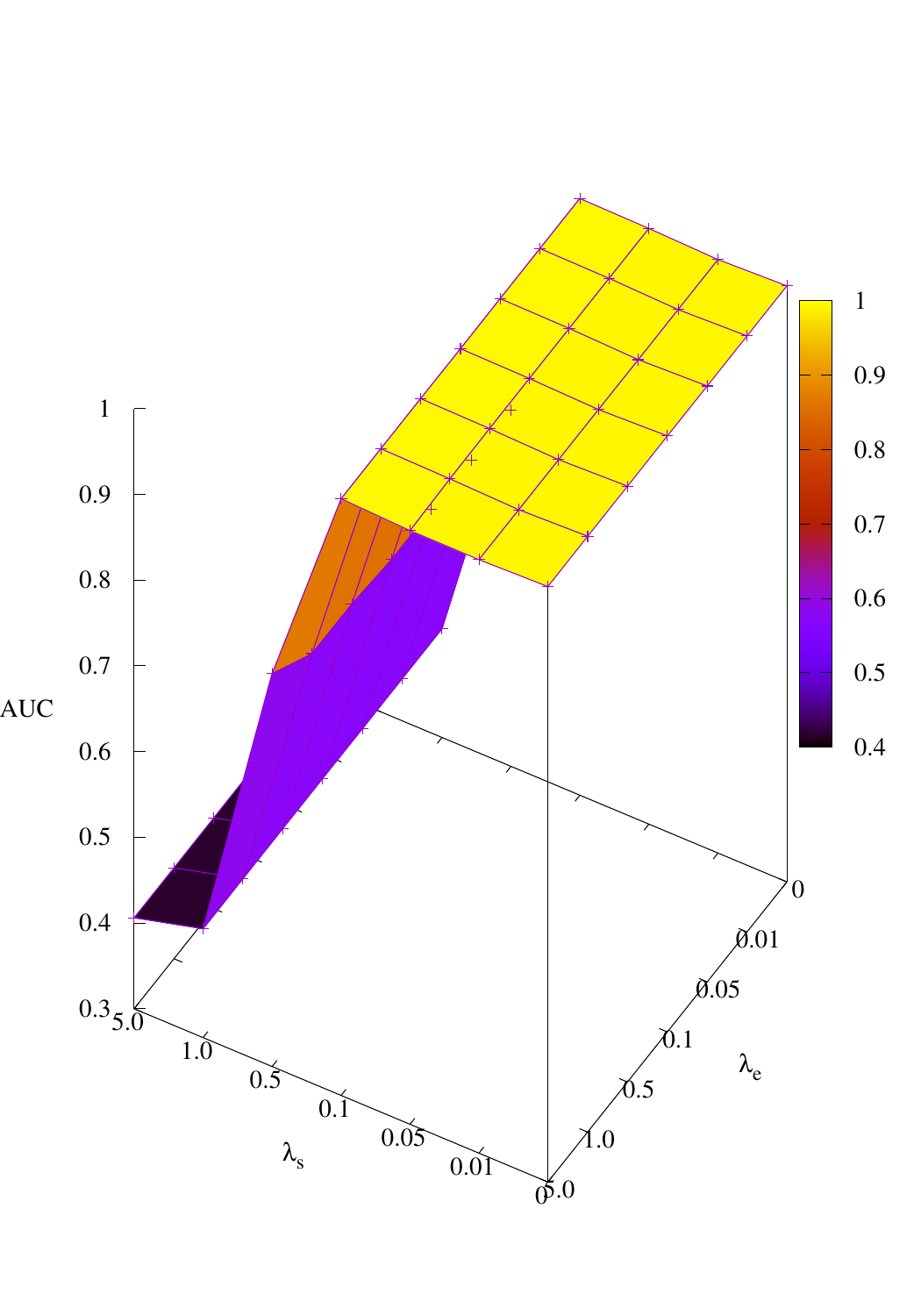
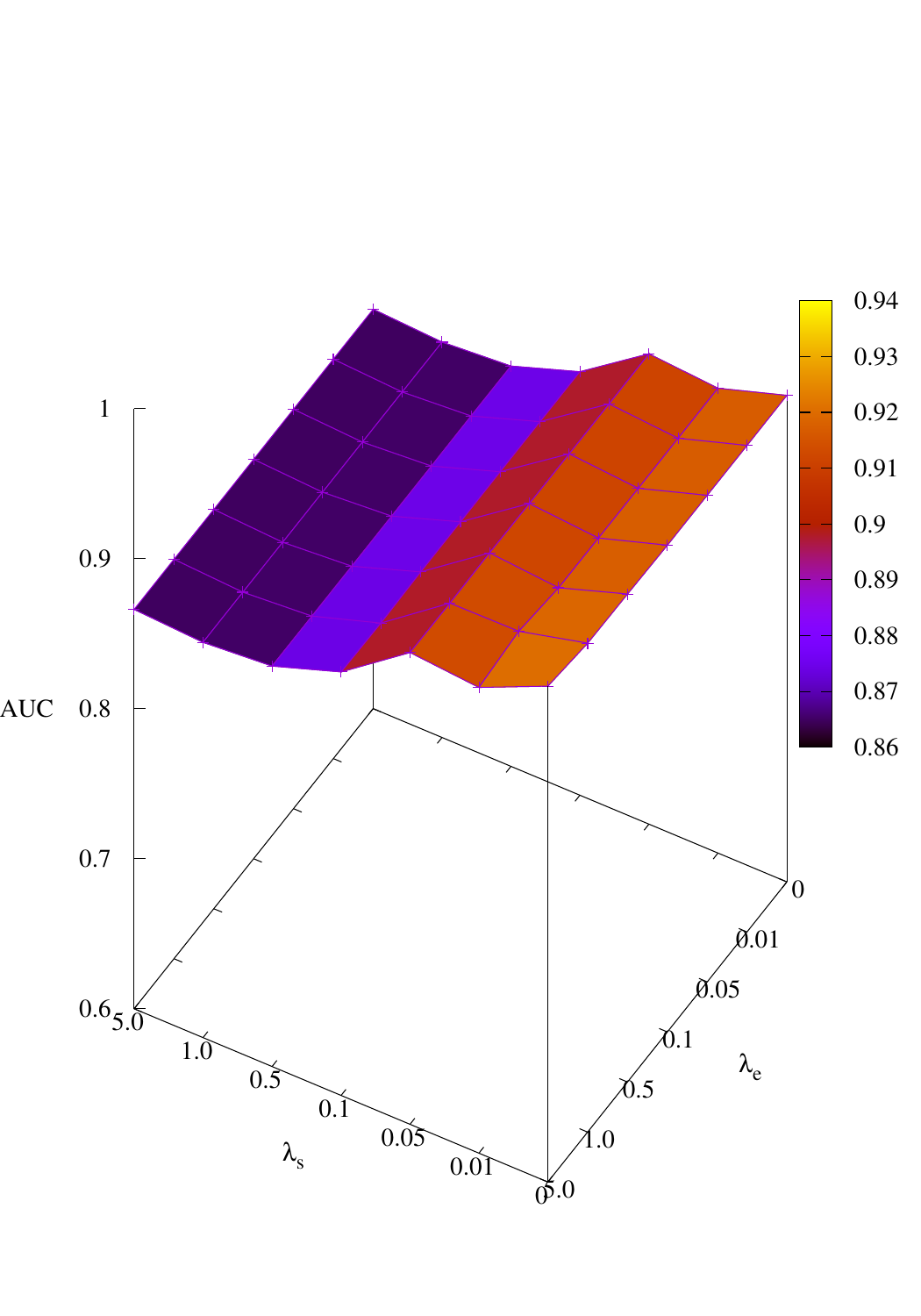
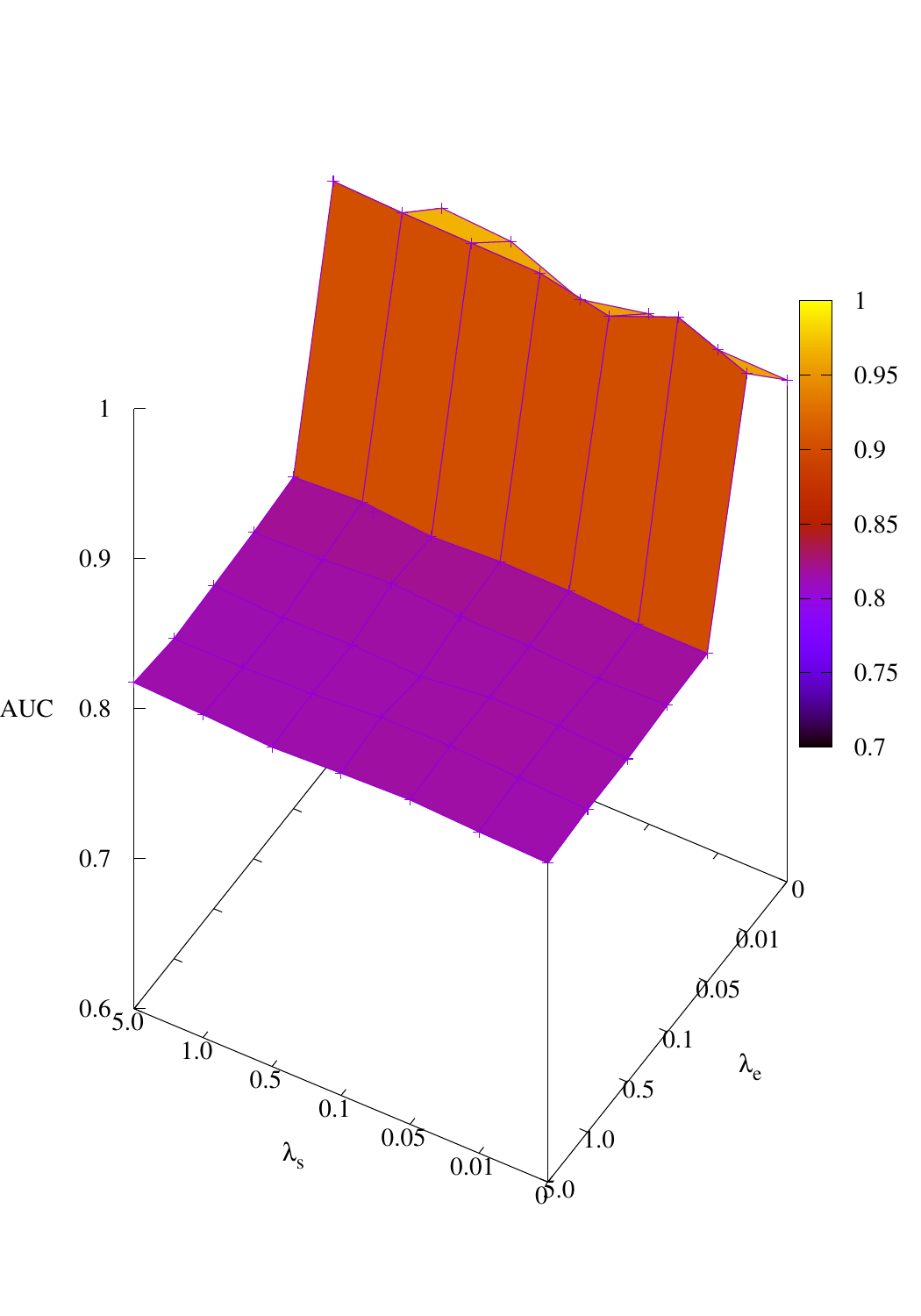
Effects of size and entropy constraint. We select synthetic datasets for parameter study. The coefficients
of size and entropy regularizers are denoted by λs and λe, respectively. AUC scores w.r.t coefficients are
shown in Figure 4. We observe that PGExplainer achieves competitive performances even without any
regularization terms in all datasets except the BA-Community, which verifies the effectiveness of
the model itself. For the BA-Community dataset, the entropy constraint plays an important
role.
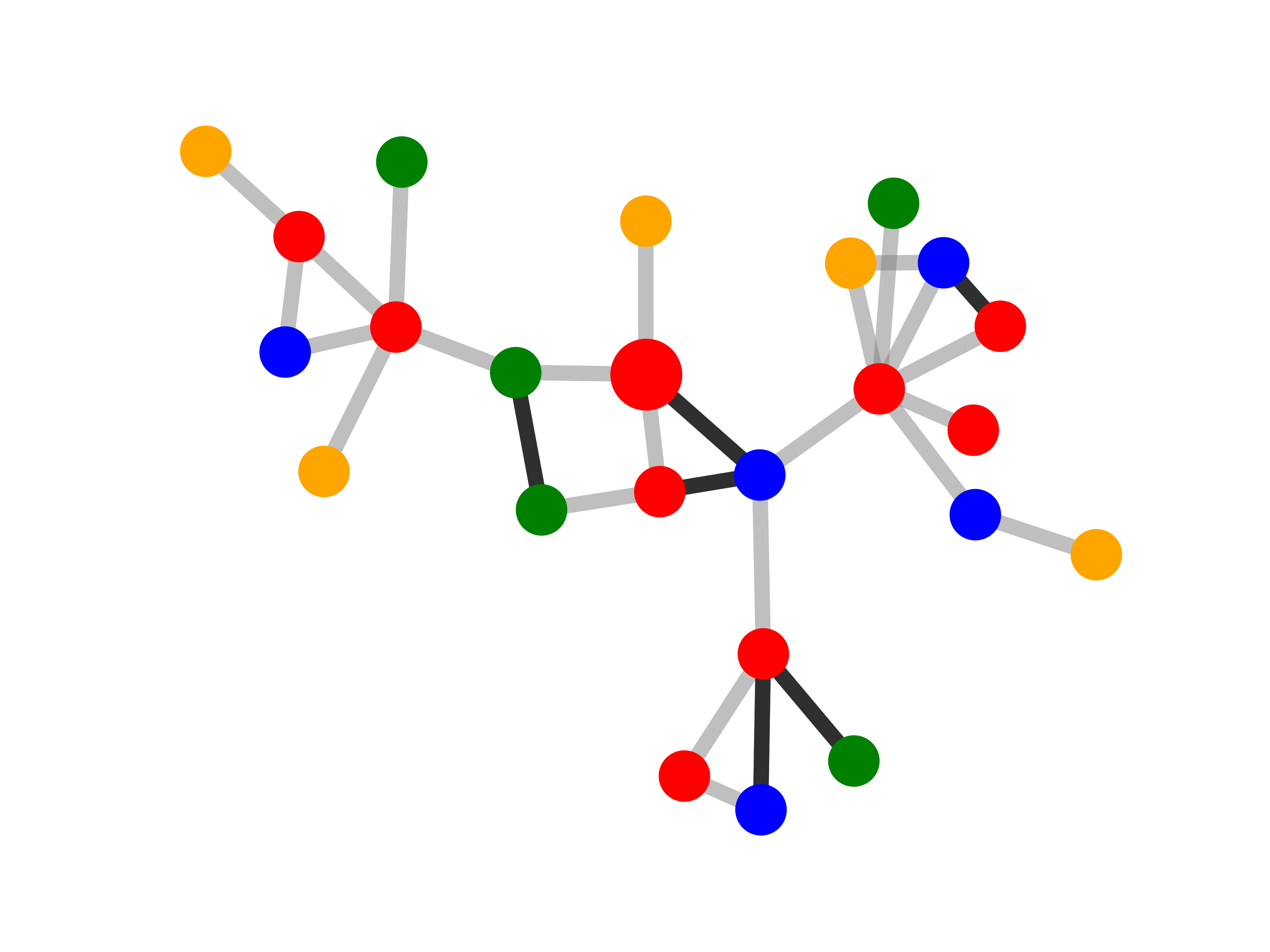
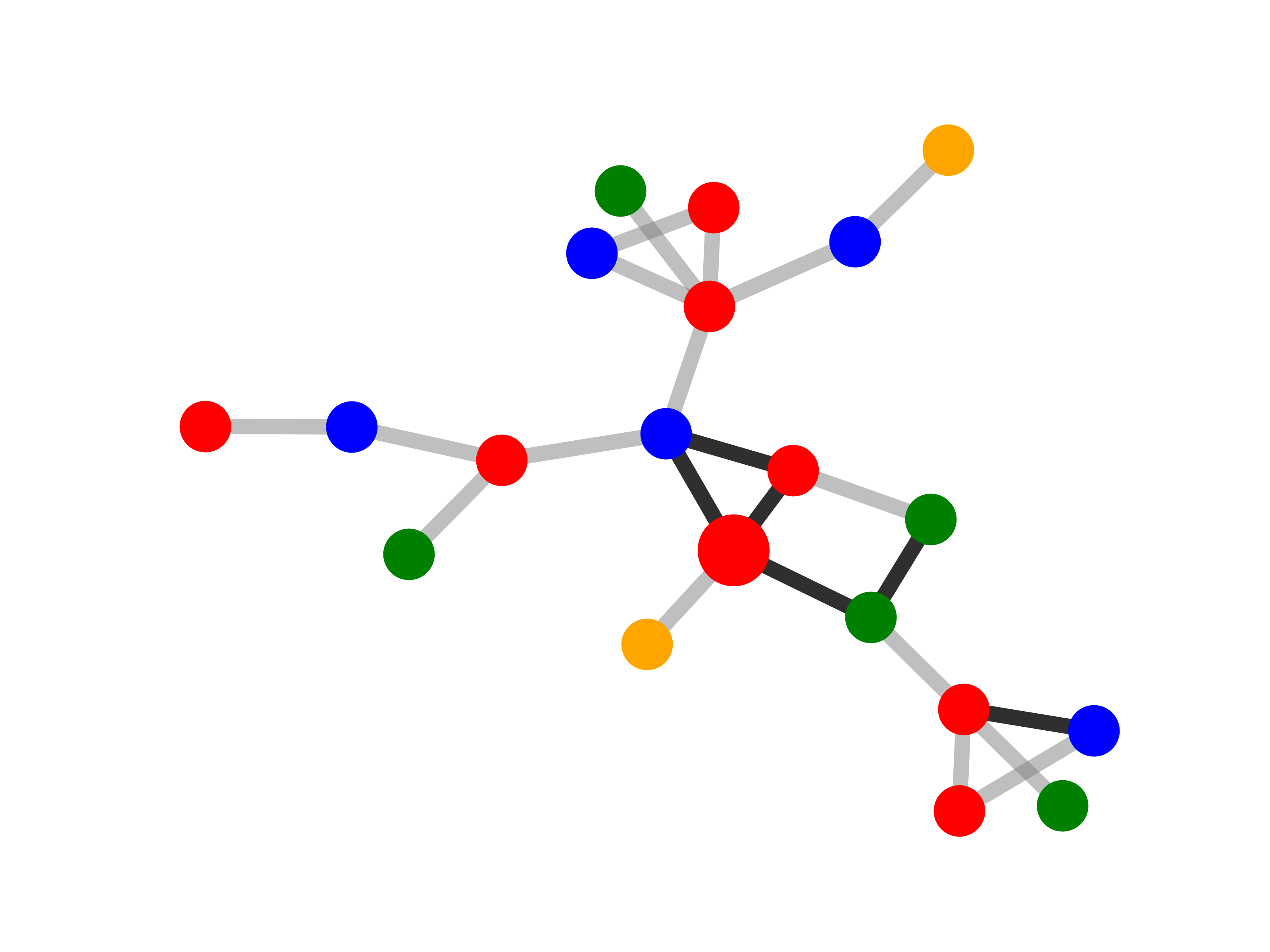
Effects of connectivity constraint. To show the effect of the connectivity constraint on the explanatory
graph, we build a noisy BA-Shapes dataset with 0.2N noisy edges. We vary the coefficient of the
connectivity regularization term λc from 0 to 10 and apply PGExplainer to explain a single
instance. The visualization results with regard to different choices of coefficients are shown in
Figure 5. The figure demonstrates that without explicit constraint, PGExplainer may detect several
connected edges in the noisy input graph, although these edges are also inside motifs. With the
connectivity constraint, we observe that PGExplainer tends to provide a connected subgraph as an
explanation.
D. Selection of subset of features
In this paper, we focus on globally understanding predictions made by GNNs by providing topological
explanations. To explain node features, in GNNExplainer, the authors propose to use a feature mask to
select features that are important to preserve original predictions. Feature selection has been extensively
studied in non-graph neural networks and can be applied directly to explain GNNs, such as the concrete
autoencoder [1]. Besides, since the selected features are shared among instances across the
population, feature explanation is naturally global and applicable to new instances in the inductive
setting.


![min H(Yo|G = Gs) = min EGs[H(Yo|G = Gs)] ≈ minEGs ~q(Θ)[H(Yo|G = Gs)]
Gs Gs Θ](Main2x.png)





![ω = MLP ([z;z ;z ]).
ij Ψ i j v](Main12x.png)
![ωij = MLP Ψ([zi;zj]).](Main13x.png)
![H (ˆeij,eˆik) = - [(1- ˆeij)log(1- ˆeik)+ ˆeijlog ˆeik].](Main15x.png)