12/2: The difficult problems in algorithm programming
Noted by Zhijun Lu1). Exhaustive Algorithm:
Some problems involve searching through a vast number of potential solutions to find an answer, and simply don't seem to be amenable to solution by efficient algorithm. For example, TSP problem is difficult because there seems to be no way to avoid having to check the length of a very large number of possible tours. Checking each and every tour is exhaustive search: first we'll see how that is done. Then we'll see how to modify that procedure to greatly reduce the number of possibilities checked by trying to discover incorrect decisions as early as possible.
a. Permutation Generation problem.
Suppose we have a set of number:
[1, 2, 3, …, n]
there are n! permutation
length of input = logN
length of output: = O(nn!)=exponential in logN
Permutation Algorithm
int id=-1
int N=4Visit (int)
{
int t;
val[k]=++id;
if (id==N) writeperm();
for (t=1;t<=N;t++)
if (val[t]==0)
visit (t);
id--;
val[k]=0;
}
main()
{
for (int I=1; I<=N; I++)
val[I]=0;
visit(0);
}
id = number of items in permutation that have been computed.
N=the number of each element in number set.
The result is as follows:
1234 2314
1243 2413
1324 3214
1423 4213
1342 3412
1432 4312
2134 2341
2143 2431
3124 3241
4123 4231
3142 3421
4132 4321
b. Exhaustive Search in Graphs
Algorithm:
Visit(int k)
{
int t;
// id is current length of path
val[k] = ++id;
for (t=1; t<=N; t++)
if (Adj[k,t])
if (val[t]==0) visit (t);
id--;
val[k] = 0;
}
This algorithm searches all possible paths. Similar depth search but waste a lot of time.
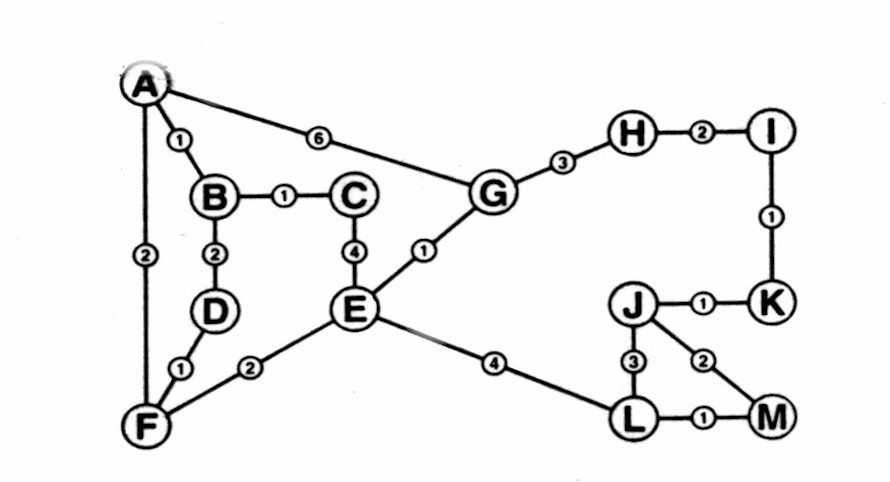
For example:
Figure 1
This algorithm can change this graph into a tree as follows:
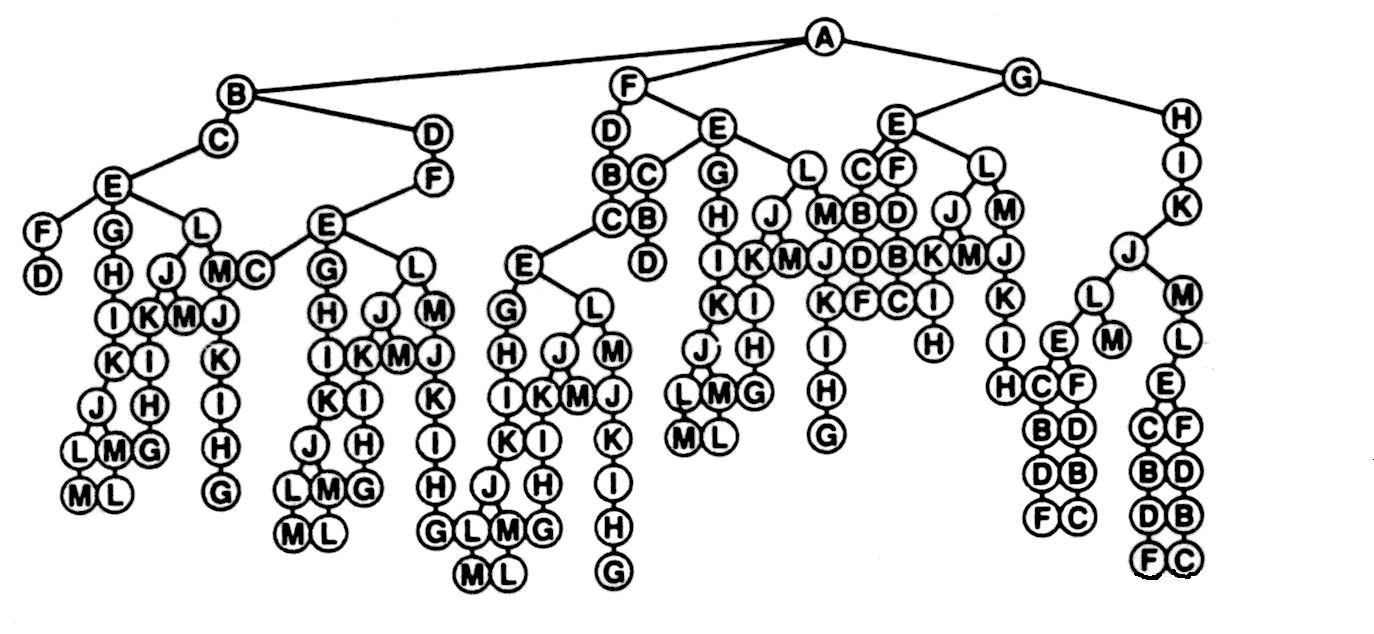
Figure 2
There are two possible ways to prune the tree:
Backtracking: solving a problem by systematically generating all possible solutions.
1. insisting that three particular nodes appear in a particular order. For example, if we insist that node C appear after node A but before node B, then we don't have to call visit for node B unless node C is already on the path, then we cut off the node avoiding searching the whole tree. This leads to the drastically smaller tree shown following figure 3.
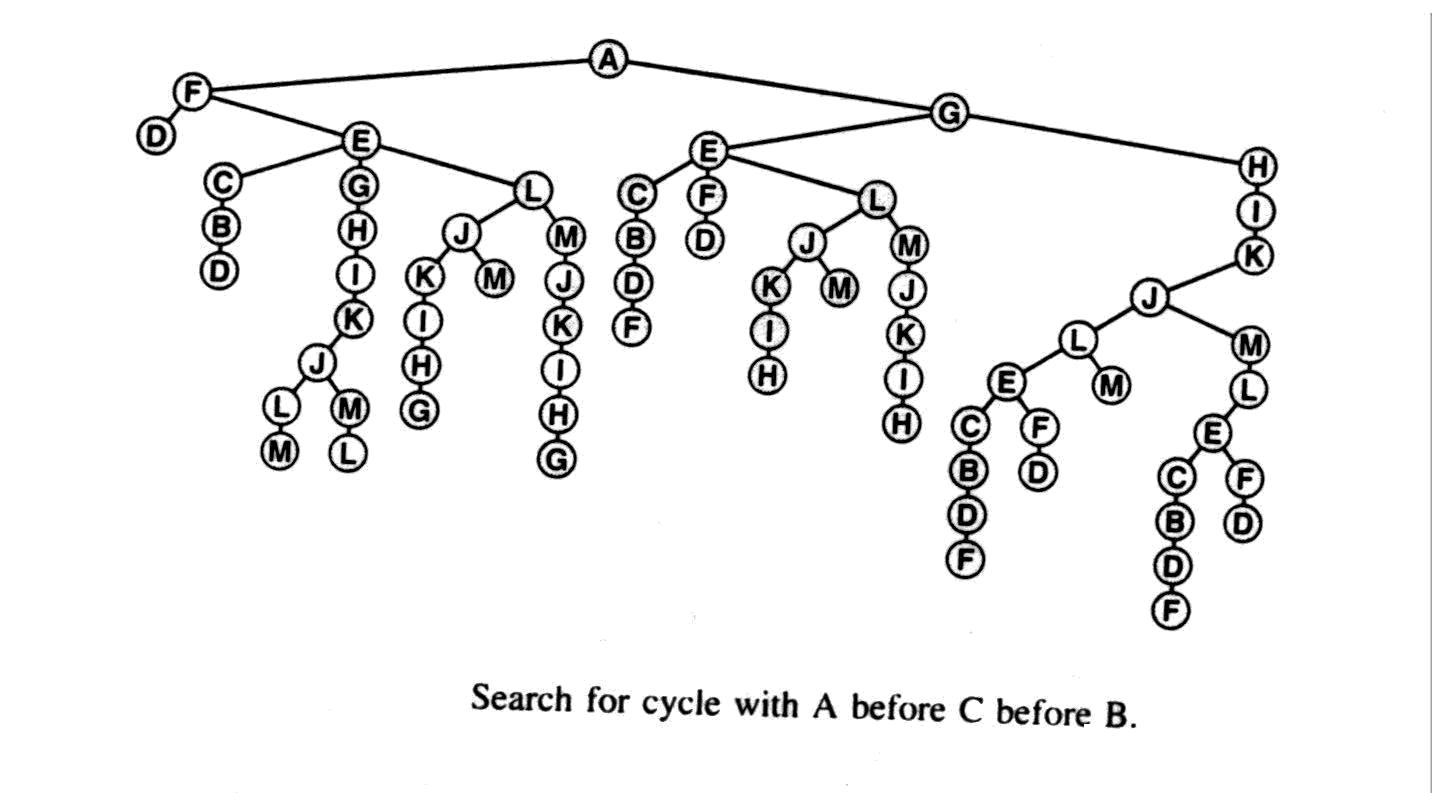
Figure 3
This technology can't be used when we can't know in advance whether a path will lead to a cycle or not.
Some paths might divide the graph in such a way that the unmarked aren't connected. For example, there can't be any simple path starting with AFE in Figure 1, since the path separates B, C, and D from the rest of the graph. Also a simple path storting wiht AGE sepatates B, C, D & F frp, tje rest of the graph. Following figure shows the search tree that results when this rule is applied to the tree of figure 3. The resulting figure is shown below in figure 4.
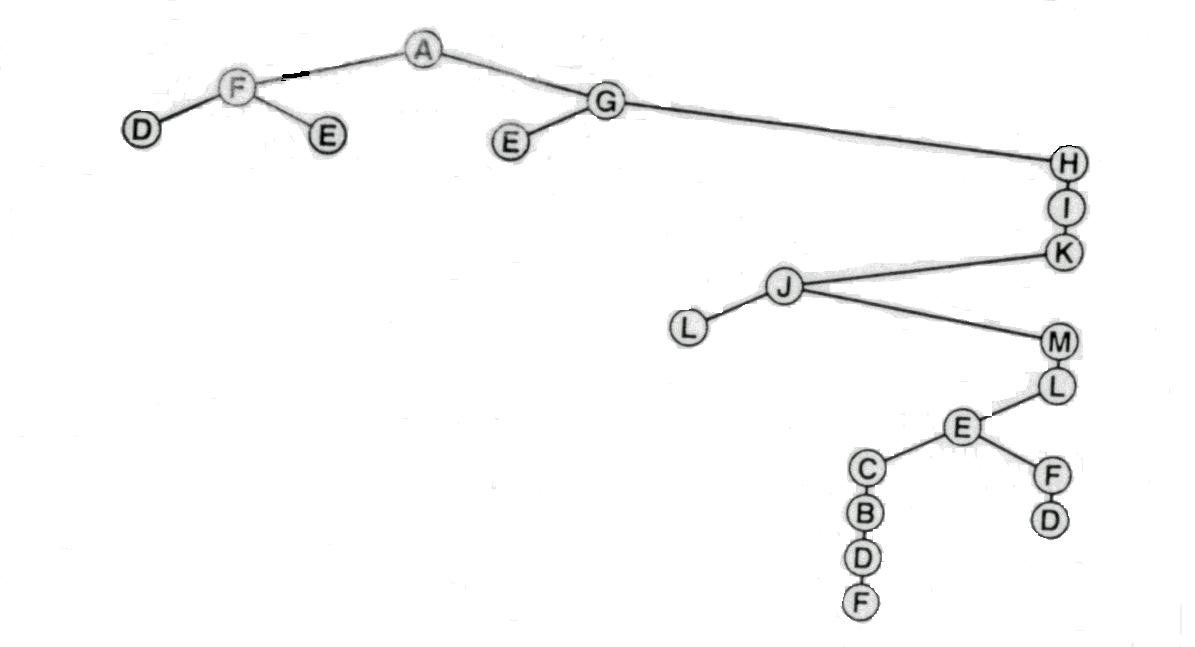 Figure 4
Figure 4
Branch & Bound: calculate the bounds on partial solutions in order to limit the number of full solutions needing to be examined. for example, we can get a much better bound on the counts of any full path which starts with the partial path made up of the marked nodes by adding the cost of the minimum spanning tree of the unmarked nodes.
2. Linear Programming:
Linear programming helps solve optimization problems. If
all of the equations or inequalitites involved can be expressed as linear combinations of
the variables, we have the special case that we're considering called linear programming.
Considering the following:
You have a choice of n food items. There are m possible nutrients in each food item. Given:
aij = amount of i-th nutrient in the j-th food
item
ri= yearly requirement of i-th nutrient
cj = unit cost of i-th food item
Design a yearly diet so that cost is minimized.
If we let xj = yearly consumption of the j-th food item, then the problem can be redefined as follows:
Min c1x1 + c2x2 +…+ cnxn
subject to:
![]() , when A is an nxn matrix
with enties [aij] .
, when A is an nxn matrix
with enties [aij] .
Linear Programming can be solved in polynomial time.
3. Shortest st-Path Problem:
We show below that the shortest st-Path Problem can be written as a
LP problem.
Let D be an incidence matrix such that if ej=(i, k), then D[i, j]=+1,
D[k,j]=-1, and all other entries on column j are 0. Note that the rows of D correspond to
vertices. We will assume that the first two rows correspond to vertices s and t. Let the
weight (or length) of edge ej be cj.
Then the problem can be redefined as follows:
Min c1x1 + c2x2 +…+ cnxn
s.t.
This problem is equal to find a solution to linear equation:
![]()